無人田植機システムへのネットワーク型RTK利用事例
独立行政法人中央農業総合研究センター 様
(2009年4月時点)
作業概要
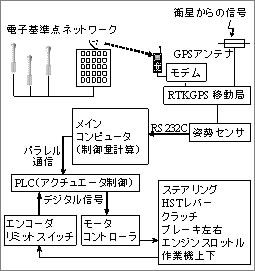
写真1に田植機を、図1に自動走行田植機のシステムを示します。
正確な田植え作業を行うためには、水田の中で田植機の位置と姿勢を高精度に把握し、 このデータをもとに田植機各部を制御します。この自動走行田植機は位置の計測にネットワーク型RTK GPSを、車体の傾きや進行方向の計測には圧電振動ジャイロと傾斜センサを組み合わせた姿勢計測装置を利用しています。 田植機の各部はすべてDCモータで、工業用のPLC(プログラマブルコントローラ)を介してコンピュータにより操作されています。
田植機を自動作業させるため、目標とする走行経路の設定を行い、これに沿って自動的に走行させます。あらかじめほ場の入り口と四隅の位置を測っておき、これを初期データとしてコンピュータに記憶させます。 ほ場入り口付近に田植機をおき、プログラムをスタートさせると、ほ場内に進入し、記憶した四隅の位置データをもとに自動的に走行経路を作成し、作業を開始します。直進作業時には、位置と姿勢のデータから、 目標経路からのずれを計算し、目標経路に沿って走行するよう操舵します。
田植機がほ場の端に達すると、植え付けを行った苗列を踏まないように前進、バックを繰り返してUターンし、次の作業行程に進入します。最後に枕地を植え付けて作業を終了します。設定した走行経路からの横方向のずれは10cm程度で、旋回後の作業行程への進入のずれも10cm程度です。作業能率は10aあたり20分程度です。

結果/導入メリット
ネットワーク型RTK GPSの利用により基準局が不要なので、初めて実験を行うほ場の位置データの記録や、システムの起動が簡単になりました。 また、受信機1台で測位できるので、これまでと比べてシステムのイニシャルコストを抑えることができます。
Contact
お問い合わせ-
まずはお気軽にご相談ください
-
お申込みはこちら