メールマガジンバックナンバー(特集記事)
- ■2024年1月号から最新号
- 2024年1月号「測量以外の活用事例ご紹介」
- 2024年2月号「強靭化されていく電子基準点網」
- 2024年3月号「基線長と精度の関係について」
- 2024年4月号「ネットワーク型RTKとは」
- 2024年5月号「高精度とは何か」
- 2024年6月号「概説「位置が求まるまで」」
- 2024年7月号「概説「高精度測位」」
- 2024年8月号「地殻変動と測位について」
- 2024年9月号「座標系について(ITRFなど)」
- 2024年10月号「地震による地殻変動と成果改定」
- 2024年11月号「標高、海抜、ジオイド高、楕円体高」
- 2024年12月号「後処理データ(RINEX)について」
- 2025年1月号「測量だけじゃないネットワーク型RTKの活用分野」
- 2025年2月号「みちびき7機体制」
- 2025年3月号「元期設定が2024年になる」
- 2025年4月号「標高成果改定の主な変更点」
2021年4月号「メルマガはじめます(事業紹介)」
弊社のサービスは、これまでは測量を中心にご利用いただいてきましたが、昨今は測量以外の利用方法も目立ってきました。
そこで皆様にわかりやすく、動画で弊社事業をご紹介いたします。是非ご覧ください!
2021年5月号「仮想点方式の動画できました」
当社の主なサービスである、補正情報サービス配信は仮想点方式(Virtual Reference Station)を採用しております。
お客様を訪問すると、よく「仮想点って何です?」と質問をいただきます。
そこで今回は仮想点方式について、動画を作成してみました。
なぜ補正データを利用すると、精度が上がるのかも説明しています。
是非ご覧ください!
★★仮想点方式 紹介動画★★2021年6月号「今と昔では位置が違う、それは地面が動いているから」
■地殻変動と地図について
例えば地図の上の座標、例えばA時点の位置に電柱が立っているとします。しかし、今GNSSをつかって受信機のみで(サービス事業者の補正情報を使わないで)、位置を割り出しても、A地点に電柱はありません。
主な原因としては、(世界測地系に則った地図であれば)地図の座標は2011年の位置であり、実際の地面は日々動いているため、今の位置と比べてずれが発生するためです。なんと1年で2cm前後は動いてしまいます!
そこで基準として、「国家座標」を定めて、ある時の位置を基準にしております。
今の国家座標は、2011年の位置(測地成果2011に準拠)になり、公共測量をはじめ、公共工事に関連するものは国家座標を使用しています。
そのためGNSSで測位した位置は「今の位置(今期)」なので、それを「2011年の位置(元期)」に補正しないと、地図では使えません。
この補正が当社のサービスで言う「地殻変動補正」になります。この補正ありなしでどんなことが起きるか、、、わかりやすい動画がありますのでご紹介します!
※国土地理院 YouTubeチャンネルより2021年7月号「インク浸透印をシャチハタと呼ぶように、GNSSはGPSと呼ばれている」
■測位衛星について(GNSS)
みなさんがよくご存じのGPSはアメリカの衛星で、今ではGPSの他にさまざまな国の測位衛星が存在します。
それらの総称をGNSS(Global Navigation Satelite System)と呼びます。
基本的には各国で1つのGNSSとなっており、他国のGNSSと連携はしておらず、各国は自国のGNSSのみ管理しています。
日本の上空に現れるGNSSは、以下のようなものがあります。
☆GPS(アメリカ)31機
☆GLONASS(ロシア)27機
☆Galileo(EU)22機
☆QZSSみちびき(日本)4機
☆BeiDou北斗(中国)49機
※参照先:内閣府 みちびき(準天頂衛星システム)
https://qzss.go.jp/technical/satellites/index.html
※機体数は2021年5月末時点、整備中やテスト機を含む
QZSSは、他のGNSSのような軌道でなく、使える範囲(国)が限られているため、RNSSと分類されることがあります。(Regional Navigation Satellite System)
これについては、また別の機会に触れます。
測位するためには、計測したい時の上空に衛星が複数必要です。
全ての衛星が日本上空いるとは限らないので、例えばGPSの31機は日本で同時に利用できません。
しかし、GPSとGLONASSといったGNSSの組合せを利用することにより、複数の衛星を確保することが容易になってきました。
多数の衛星を利用することで、測位位置を求める時間が早くなります。
(FIXが早くなります)
さて、冒頭に「国で1つのGNSS」と書かせていただいたのですが、各国のシステムが違うのに、どうして違う国のGNSSを組み合わせて使用することができるのでしょうか。
それは各国の衛星から発信される信号を、GNSS受信機がそれぞれ分析することで、位置が求められるようになったためです。
さらに周波数帯が近いことから、アンテナを小型化することができ、持ち運びできる機器に実装することができています。
各GNSSの信号(周波数)は以下の通り。
例えば1575.42MHz帯であれば、GPSのL1、GalileoのE1、QZSのL1、BeiDouのB1、近似するGLONASSのG1の信号が利用できます。
☆GPS(アメリカ)
L1(1575.42MHz)
L2(1227.60MHz)
L5(1176.45MHz)
☆GLONASS(ロシア)
G1(1598.0625~1605.375MHz±0.511MHz)
G2(1242.9375~1248.625MHz±0.511MHz)
L3 (1201MHz)
☆Galileo(EU)
E1(1575.42MHz)
E5 (1176.45MHzおよび1207.MHz)
E6 (1278.750MHz)※補強信号
☆QZSSみちびき(日本)
L1(1575.42MHz)
L2(1227.60MHz)
L5(1176.45MHz)
L6 (1278.750MHz)※補強信号
☆BeiDou北斗(中国)
B1(1561.098MHzおよび1575.42Hz)
B2(1176.45MHzおよび1207.MHz)
B3(1268.52MHz)
各国のGNSSを利用することで得られるメリットもありますが、デメリットもあります。
複数のGNSSを使用して測位をする際、ある国のGNSSが不調だった場合、解析に不調なGNSSを影響が出てしまいます。
(通常は使用しないようにする仕組みがありますが、タイムラグなどで、必ず回避できるといえない状況です)
また、各国によってシステム(軌道、時計、信号など)が違うため多数のGNSS信号を受信すると、解析に負荷が発生します。
時にはGNSSの種類を減らすことも、観測のテクニックになります。
測位衛星については、まだまだ話題がありますので、また後日記事にさせていただきます!
2021年8月号「衛星だけでなく地上の施設があるから精度が上がる」
■高精度を支える地上施設について
明治時代に日本全国の正確な地図を作成するために、「三角点」という標識(緯度経度、座標が分かっている点)を設置しました。
三角点は一等から四等まで約11万点あり、三角点の既知座標を使って現地の位置を求めたり、測量した成果を三角点の座標と整合することで、測地成果としています。
その三角点と同様の役割を果たすのが、「電子基準点」です。
電子基準点も、標識として緯度経度、座標が分かっている既知点になり、全国で約1300点設置されています。
電子基準点の心臓部にはGNSS受信機が設置されており、電子基準点の位置情報をGNSSから取得することで、求めた位置と既知の位置のズレから、「衛星位置」「衛星時計」「電離層遅延」「対流圏遅延」などの誤差源を推定し、電子基準点を利用した測位結果の精度を向上させることができます。
また、日々観測しているので地殻変動も把握することができます。
観測した全国の電子基準点データは、国土地理院のサーバにデータアーカイブされます。このネットワークをGEONETと言います。
当社の仮想点RTKは、このGEONETの情報を使うことによって、衛星から地上までの誤差を補正し、高精度な測位を実現させています。
2021年9月号「衛星から観測位置まで誤差要因がたくさんある」
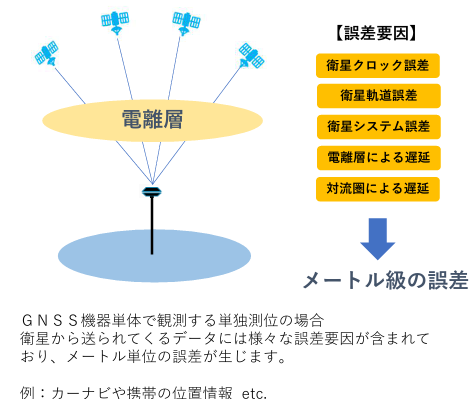
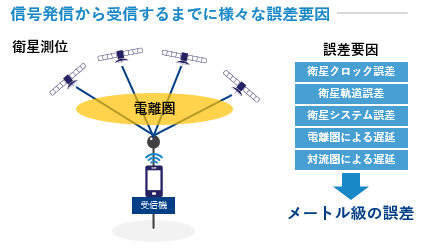
■衛星測位の誤差要因について
例えばスマホで衛星から直接受信して位置を求めた場合(単独測位)5~10m程度のずれが発生します。(測量機器であれば2-5m程度)このずれを生む要因について概説いたします。
・衛星による要因(衛星位置・時計)
衛星が設計通り理論通り運用しているように思えますが、実際は計算された軌道とはズレが発生します。衛星機体には正確な原子時計をもっているのですが、完璧でなくわずかにずれていきますので、メンテナンスで同期がとられています。
衛星から発信した電波を使って測位するため、発信元の誤差は測位結果の誤差要因になります。
・大気層の要因(電離層、対流圏)
衛星から発信された電波は、地上の我々に受信される間、大気層を通過する際、電離層と対流圏で電波速度に影響が発生します。
電離層は自由電子とイオンの層で、太陽活動によって電子の密度が変わります。密度が高いと速度遅延が発生します。対流圏は乾燥している大気と湿度のある大気の境目で、水分量の違いなどにより速度に影響がでます。
・受信側の要因
大気層を抜けた電波は、さらなる誤差要因に遭遇することがあります。
観測する場所・時間帯によって、マルチパス、衛星配置による誤差が発生するからです。
マルチパスは建物などにより、電波が反射や回折することです。
この電波を受信することで、誤差が生まれます。
衛星は原則的に軌道周回しているので、上空の同じ位置にいません。
観測位置の天頂に衛星があれば、衛星と最短距離で電波を受信することができますが、衛星が低高度(仰角)にある場合は衛星との距離が離れ、距離が長くなる分、大気層を通過する部分が長くなるため、誤差を生みやすくなります。
そのため、観測時点の衛星の配置(バランスの良い配置)が重要になります。
このような要因から、計測位置の誤差が生まれます。
ジェノバのネットワーク型RTKは、衛星による要因、大気層の要因をたくさんの地上受信施設(電子基準点)を使用して除去することで、高精度測位を実現させています。
2021年10月号「衛星測位はどうやって位置を求めるか」
■どうして衛星測位できるのか~単独測位~
測位衛星は信号を発射しており、信号には信号発射時間に関するものや、衛星位置に関するデータが含まれています。この信号をGNSS受信機が受信し、解析することで衛星との距離を求めることができます。
(単純には、衛星から受信機まで信号が届いた時間×信号の速度で距離が求まります、疑似距離と言います)
しかし、ある1機の衛星との距離を求めたところで位置は求まりません。
そこで他の衛星との距離も求め、複数の衛星からの距離を求めることで、3次元の位置を求めることができます。3次元位置と受信機の時計誤差の見積のため、少なくとも4機の衛星が必要になります。
ここまでの計測方法を「単独測位」と言いますが、信号の発信から受信までさまざまな誤差要因があるため、メートル級の精度となってしまいます。
■位置精度を高める方法~相対測位~
単独測位よりも位置精度を高める方法がいくつか開発されました。
今回は「相対測位」について触れていきます。
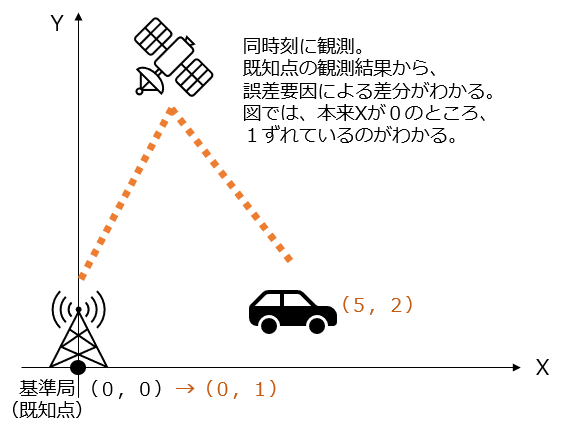
相対測位は、正確な位置が分かっている点(基準局)を利用することで精度を高める測位になります。
まず、基準局と位置を求めたい点(観測点)を同時に観測します。
これは同じ衛星から、同じ信号を受信する必要があるためです。
基準局では既に正確な位置が分かっているので、衛星から受信して解析した位置との差分が分かります。
この差分は、衛星信号の発信から受信までの様々が誤差要因による差分と言えます。
この差分を使って、同時に観測した観測点の観測結果に対し、補正することで、精度の向上が期待できます。
(この方式を「デファレンシャル測位」と言います)
さらに衛星との距離を求める方法に、これまでの疑似距離の算出と、衛星信号の搬送波を利用することで、より高精度に位置が求められます。
(この方式を「リアルタイムキネマティック(RTK)測位」と言います)
■相対測位の弱点
相対測位の弱点が大きく2つあります。
1点目は観測点が基準局の近傍でないと、精度が劣化することです。
観測点が基準局から離れるほどに、基準局と観測点の衛星信号の受信環境が変わってしまうからです。
例えば基準局と観測点が離れており、大気層(電離層、対流圏)の状況が違うことにより、誤差要因が違ってくるため、差分を取っても誤差を消去しきれません。
2点目は基準局の観測環境が悪化することによる、精度の劣化です。
基準局の機器の性能や、受信状況が悪いと、自ずと観測点の精度も劣化します。
長期間基準局を利用する場合は、基準局の管理が必要になります。
さて、この弱点を克服した方法こそ、弊社の仮想基準点を使った「ネットワーク型RTKサービス」になります。
本件については、次回にご説明させていただきます。
2021年11月号「ネットワーク型RTKとは何か」
■リアルタイムキネマティック(RTK)測位方式
測位衛星からの信号を利用して位置を求めることができるのですが、その場合、衛星の信号発信から受信まで、さまざまな誤差要因があるため、単独の測位信号だけ(コード疑似距離)ではメートル級の精度となります。
そこで、正確な位置が分かっている点(基準局)を利用します。基準局で同時刻に計測した結果は、近距離では誤差とみなせる要因を含んでおり、本来の正確な位置との差分を求めることで、未知点での観測データを補正し、測位精度をあげることができます。
これを相対測位と言い、さらに衛星との距離計算において、コード疑似距離だけでなく、衛星信号の搬送波を利用することで精度をさらに高める方式を、リアルタイムキネマティック(RTK)測位方式と言います。
なお「リアルタイム」とついているのは、リアルタイムでない、後処理のキネマティック測位もあるからですが、それはまた別の機会に。
■相対測位の弱点
上記RTK方式を含む相対測位の弱点として、以下2点あります。
・基準局と計測点が離れるほど、誤差が消去しきれなくなる
・基準局の観測環境が悪化することで精度劣化する
(極端な話、基準局のアンテナが傾いたら誤差成分が変化します)
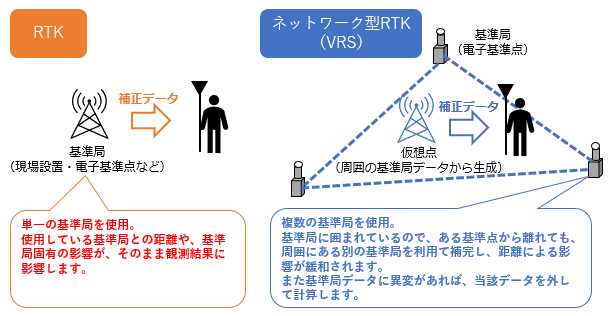
■ネットワーク型RTKとは
RTK方式は計測点と基準局が1対1の関係ですが、ネットワーク型RTKは複数(3点以上)の基準局を利用する方式です。
計測点と基準点が1対Nになり、原則計測点は基準点に囲まれた状況で計測します。(囲まれた状態の補正方法を内挿、囲まれない外側の補正方法を外挿と言います)
RTK方式のような1対1の場合、基準局から計測点が離れれば、離れるほどに状況が変わり精度が劣化しますが、ネットワーク型RTKの場合は、計測点が基準点に囲まれているため、ある基準点から離れても、周囲にある別の基準局を利用て補完するため、距離による影響が緩和されます。
ネットワーク型RTKを実施するためには、基準点の観測データを常時計算し、かつユーザーの計測位置に近い基準局の補正情報を解析、配信するサービス※と、データ通信できる環境での計測が必須となります。
※このサービスを提供しているベンダーの1つが当社になります
■電子基準点RTK、仮想点RTK(VRS)
日本国内では国土地理院の電子基準点データが全国約1300点整備されれており、同院により管理提供されています。
電子基準点RTKは、上記の電子基準点を利用したRTKで、基準局を電子基準点にすることで、計測点は電子基準点に原則囲われることになり、補正計算の際には最寄りの電子基準点の観測データを利用して補正を実施します。
仮想点RTKはネットワーク型RTKで、計測点の近傍に仮想の基準局を生成して、仮想の基準局観測データから補正を実施します。電子基準点RTKに比べ近傍に基準局が存在するため、より早い初期化(FIX)と周囲の電子基準点で補間するため、RTK方式よりも高い精度補正が期待できます。
VRSとも呼びます(Virtual_Reference_Station)。
また、仮想点は電子基準点網のデータを基に生成しており、物理的な観測機器は存在しないため、雨風など直接的な影響を受けません。
2021年12月号「後処理キネマティックとは」
■後処理キネマティックとは
PPK(Post Processing Kinematic)方式とも言います。
RTKは「Real Time Kinematic」の略で、その名の通りリアルタイムにキネマティック方式で位置補正行うに対して、後処理キネマティックは「後で」補正を実施します。
例えば弊社では電子基準点データを365日24時間解析し、保有していることから、観測した日時・場所のデータを検索し、ダウンロードすることで、補正データを入手することができます。
RTKも後処理も補正方法はほとんど同じ、基準局の観測情報を利用して、未知点の観測情報を基に補正を実施するものですが、後処理にはどのようなメリットがあるのでしょうか?
次のようなメリットがあります。
・データ通信ができない場所でも利用できる
→リアルタイム通信する必要がないので、電波が届かない地域でも利用できます。
・リアルタイムの補正情報より、平準化されているので安定する
→例えば、電離層など「その時」の情報で補正するより、後処理のほうが平準的になる傾向がある
・1周波の測器が使用できる(古い測器も利用できる)
■ドローンとMMSを中心に利用が広がる後処理キネマティック
弊社サービスの利用状況から、測量をはじめ、ドローン、MMSでのご利用が目立ちます。
ドローンでは物流(配達)のような、リアルタイムで位置情報を取得しなければならない用途では使えませんが、計測した結果を後日解析する用途などに利用されています。
最近は特に、レーザーやLIDER(light detection and ranging)を搭載したドローンが増えてきて、レーザーから得た膨大なデータをリアルタイムに処理するには負荷が高く、後処理データのほうが解析が早い(高スペックなPCを利用できる)点から、採用されているのではと推測しています。
MMSは、モービルマッピングシステムの略です。
その名の通り、車の上部にカメラやレーザーを搭載して、走りながら計測し、3Dマップなどを作成します。
こちらも計測後に、後処理データを利用して補正を実施しています。
このように、用途に応じてリアルタイムと後処理の使い分けをすることができます。
2022年1月号「後処理仮想点データ動画のご紹介」
前月のメルマガについて、後処理方式(PPK)において後処理データ(RINEXデータ)で、「仮想点データ」を弊社で用意している点にも、少し触れました。
今回は「仮想点データ」のメリットについて、動画を作成しましたので、是非ご覧ください!
■■後処理解析「仮想点データ(V-RINEX)」のご紹介■■2022年2月号「QZSS「みちびき」とは」
昨年10月26日に、みちびき初号機の後継機が打ち上げ成功しました。
「みちびき」は愛称で、正しくはQuasi(殆ど)Zenith(天頂)Satellite(衛星)SystemでQZSS、準天頂衛星システムと言います。
今回打ち上げられた後継機以外に、現在4機の衛星が運用されており、1機は静止衛星で赤道上の決まった位置にいます。(地球から見て決まった位置にいます、地球の自転と一緒に移動しています)
静止衛星から受信にあたり、固定した方向にアンテナを向ければ受信しやすいという特徴があります。(放送や配信に向いています)
残り3機は移動衛星ですが、GPSやGLONASSが世界中の上空を飛ぶに対して、QZSSは主に日本上空の天頂付近に長く留まるように飛びます。
(日本と経度が近い南半球の国の上空も飛びますが、日本に比べ早い速度で通り抜け、日本天頂付近になるとゆっくり移動します)
ちなみにQZSSはGNSS(Global Navigation Satellite System)でなく、RNSS(Regional Navigation Satellite System)と分類されます。
※RNSSは他にインドのNAVIC(IRNSS)、とBeidouの一部があります
●GPSと併せて使うことができる
QZSSはGPSに近似する周波数で配信を行っているため、GPSと併せて測位に利用することができます。
さらにQZSSについては、衛星が日本の天頂付近にいるということで、ビルの狭間でも天頂が開けていれば衛星を補足しやすいということになります。
衛星測位を行うために、4機の測位衛星を捕捉しなければなりません。
現状QZSSの移動衛星は3機ですが、それぞれ離れているため3機とも天頂付近で捕捉できるわけでなく(1~2機程度)、足りない分はGPSなどの衛星を併用して測位を行います。
2023年の7機運用では静止衛星が3機になる予定です。QZSSだけで測位ができるようになることが想定されています。
●測位補強サービス
QZSSは測位用の配信に加え、測位補強サービス用のデータも配信しています。
この配信データは電子基準点から計算しており、QZSS衛星から直接受信し、受信機内で解析を行うことによりセンチメーター級の精度で測位することができます。(CLAS)
衛星から配信データを受信できれば良いので、上空が開けていれば場所を問いません。
当サービスを利用するためには、対応する受信機が必要となり、今後の普及が期待されます。
ちなみにこの測位方式をPPP-RTK方式と言います。(Precise Point Positioning)
2022年3月号「測量だけじゃないネットワーク型RTKの活用分野(建設)」
日本の人口減少、建設現場での働き手の減少が想定されるなか、国土交通省は業務の生産性向上や魅力度向上のため、「i-constraction」を整備、推進しています。中でも作業のICT化にフォーカスがあてられ、ICT技術を活用した施工、建設機械が登場するようになりました。
ICT施工を行うにあたって、高精度GNSS測位技術を活用・応用し、GIS(Geographic Information System:地理情報システム)と連携することなどで、さまざまな工種の効率化が図れます。
さらに仮想基準点方式を採用することで、現場に基準点を設置・管理する作業がなくなることで、さらなる生産性の向上が実現します。
ネットワーク型RTKを活用した、代表的なICT建機をご紹介します。
1)ICT建機(ショベルカー、ブルドーザー)
代表的なICT建機としてショベルカー、ブルドーザーがあり、新車から中古の建機に後付けするモデルもあります。
刃先の位置情報と設計データとの比較を見せることで、作業のガイダンスをします。例えば土を盛る作業において、従来は目印を建て熟練者の技量で施工していたことに対し、設計データとの差をモニタ―で確認して作業できるため、目印も熟練者の技量も不要となり、省力的・効率的な施工ができるようになりました。
2)転圧回数管理システム
盛った土や路盤・路床などを締め固める作業があります、これを転圧作業と言います。この作業に対してロードローラーなど、転圧をする建機があり、こちらもICT化が進んでいます。
転圧機械が位置情報を持つことで、転圧箇所や回数や、出来形(施工成果)をICTにて管理することができ、オペレーターや検査、管理の作業負荷が軽減されます。
3)RTKドローン、ハンドヘルドスキャナ
前述に比べ重厚な機器ではありませんが、ドローンやスマートフォンと組合せて活用するツールも登場してきました。
ドローンについては、建設現場の施工前の状況を把握するためにおこなう起工測量や、施工後の出来上がりを確認する出来形測量などに活用され、従来の1つ1つ計測を行っていたのに対して、写真やレーザーで一斉に計測することから、生産性が非常に高いです。
また、計測するデータを3次元データにすることで、前述のICT建機で利用できたり、例えば工事に必要な土の量を計算するなど、体積も求めることもできます。
上記のドローン観測から3次元データの作成をすることを、地上から手持ちのスマートフォン(あるいはスマートフォンにアタッチメントを付けたもの)を使い撮影することで、実現できる製品もでてきました。
これはスマートフォンから撮影する写真や、機種によってはスマートフォンに搭載されているLiDERセンサーを使用しています。
2022年4月号「測量だけじゃないネットワーク型RTKの活用分野(農業)」
農業分野においての社会課題として、担い手の減少・高齢化の進行等により労働力不足が深刻な問題となっており、さらに人手が必要な作業や、熟練者でないとできない作業が存在することも、課題解決の障害になっています。
そこで、先端技術(ロボット、AI、IoTなど)による課題解決の取組が行われています。例えば作業の自動化、情報の共有、データ活用などで、作業負荷の軽減、効率化や熟練者作業もデータを使って代替します。このような取り組みを「スマート農業」と言い、国も普及を推進しており、既に現場に導入されたものや、様々な実証実験が進められています。
ネットワーク型RTKを活用した、スマート農業への活用事例をご紹介します。
1)トラクター等のガイダンス、自動操舵
トラクターは、取り付けたアタッチメントを引くことで、田畑を平らに整える、土を盛り上げて畝(うね)を立てるなど、さまざまな農作業に活用されています。
トラクターのガイダンスは、トラクターが取得した位置情報をもとに、モニターに進路経路案内と作業完了履歴を残すことで、田畑に目印をつけることなくムダ、ムラなく効率的に作業することができます。
さらに位置情報とガイダンス情報をつかって、トラクターのハンドルを制御することによって(自動操舵)、自動的に作業をさせることができます。これにより熟練者並みのトラクター操作ができることで、作業の効率化、省力化が図れるだけでなく、視界の悪い夜間作業等にも対応することができます。
上記はトラクターの例をご紹介しましたが、自動操縦では他に田植機や、芝刈り機にも応用がされています。
2)ドローンを利用した作業、管理
ドローンにおいては散布作業(農薬散布、肥料散布、種まき)に利用されています。
従前は熟練者による機体の操作が必要でしたが、ドローンにおいては自動航行することができるため、熟練者でなくてもムダ、ムラなく効率的に作業することができます。
またマルチスペクトルカメラという、人の目で見える光だけでなく、紫外線や赤外線、遠赤外線など人の目で見えない不可視光を記録できるカメラがあります。このカメラで農作物から反射する光を解析することで、農作業の育成状況を確認することができます。
マルチスペクトルカメラを搭載したドローンで、田畑を撮影し、専用ソフトウェアで解析することで、農作物の育成が良好でない範囲が特定でき、原因が栄養不足などであれば追加で肥料を散布する、害虫が発生していれば駆除をする等の対策を打つことができます。
2022年5月号「サービスの活用分野(公式サイト掲載事項案内)」
メルマガの前号、前々号にて、「測量以外の活用分野」についてご紹介してまいりました。
今回のWEBサイトにおいても、測量を含めた様々な分野の活用について以下のようなページをご用意しております。
ご関心にある分野について、閲覧いただけると幸いです。
☆測量・土地家屋調査 https://www.jenoba.jp/survey/
☆ICT施工 https://www.jenoba.jp/construction/
☆スマート農業 https://www.jenoba.jp/agriculture/
☆UAV(ドローン) https://www.jenoba.jp/uav/
☆モビリティ・ロボット https://www.jenoba.jp/mobile/
2022年6月号「ジェノバサービスの特長」
展示会で、弊社サービスについてご説明した内容と重複してしまいますが、あたらめて当社のサービスである「高精度GNSS補正情報配信サービス」の特長についてご紹介いたします。
■国土地理院・電子基準点データを使用した仮想点ネットワーク型RTK
ネットワーク型RTKは複数(3点以上)の基準局を利用する方式です。
弊社サービスは、基準局データに国土地理院の電子基準点データを使用しております。
また計測点の近傍に仮想の基準局を生成して、仮想の基準局観測データから補正を実施します。他のRTK方式に比べ近傍に基準局が存在するため、より早い初期化(FIX)と高い精度補正が期待できます。
さらに、基準点が仮想なため設置から管理する工数は不要で、雨風等の影響をうけません。
■地殻変動補正(特許第5832050号)
日本国内においては、複雑な地殻変動が常に発生しています。
衛星測位をすると現時点の位置が計測されます。この位置は過去情報で作成された地図とは、地殻変動の影響もあってずれています。
そのため当社では地殻変動量を計算して、補正を行っております。
■国家座標に準拠
国としての位置の基準とする座標を「国家座標」と言います。
公の地図は、国家座標に準拠しています。
当社のネットワーク型RTKは、国土地理院の電子基準点の位置を基準にしている(あるいは電子基準点データを基に仮想点を生成している)かつ、上記地殻変動を補正することで、国家座標に準拠した計測結果を得ることができます。
■ハンドオーバー機能
仮想点については、計測点が離れれば離れるほどに、点間の距離が長くなってしまい、点間が10kmを超えるにつれて影響が出てきます。
そこで点間10kmを超えそうな頃に、再度仮想点を生成して点間距離の影響を出さないようにしています。これをハンドオーバー機能と言います。
■24時間観測データの監視
当社は365日24時間の電子基準点のデータをリアルタイムに受信し状況を監視しており、例えば電子基準点のメンテナンス等で一時的に停止した場合や、状況が悪化した対象電子基準点を外して運用するなど、データ精度の品質を担保しています。
上記のような特長から、安定した信頼性の高い測位が実現します。
2022年7月号「宇宙天気のこと」
衛星測位は、GPSをはじめとした測位衛星からの信号を地上で受信し、最低4つ以上の衛星との距離を求め、解析し、位置を求めています。
衛星から地上の受信機までの間には電離層(電離圏)があります。
電離圏は宇宙と大気の境目であり、大気の成分が太陽光で電離し、電離後の電子とイオンでできた層になっています。
衛星からの信号が電離層を通過する際、電子とイオンが影響して通過速度が劣化します。
前述のとおり、測位のために衛星と受信機の間を距離を計算するのですが、理想としては以下のようになります。
衛星と受信機間の距離=信号の速度×(信号受信時間-信号発信時間)
しかし「信号の速度」が電離層を通過している時に遅くなることで、測位結果に誤差が発生します。
■太陽フレアによって電離層嵐が発生
太陽からは常に太陽風(太陽から吹き出すプラズマ、電気を帯びたガス)が地球に吹いているのですが、地球の磁気(磁気圏)がそれを防いでいます。
しかし、太陽フレアによる大爆発により、強力な太陽風が吹くことで磁気圏が揺らぎ、電子とイオンでできた電離層の密度を変えます。
太陽フレア発生から数時間から数日間、影響が出るといわれています。
■電離層嵐によるGNSS測位への影響
電離層嵐が発生すると電離層の密度が、常時に比べ変化することから、さらに信号の速度速度に影響し、結果大きな測位誤差が生まれます。
太陽フレアの影響について、以前国土地理院から報道発表がありました。
【参考】国土地理院HP
https://www.gsi.go.jp/denshi/denshi40001.html
1周波の測位(カーナビゲーション、スマートフォン単体測位)については、通常誤差よりも多くの誤差が発生してしまったようです。
しかし、昨今の測量機器で利用されている2周波の機器であれば、影響は大きく受けないとのことでした。
(これは電離層の誤差要因を除去する測位方式のためです)
■宇宙天気予報
太陽フレア、電離層嵐による測位への影響に限らず、他の社会活動も宇宙からの影響を受けます。
そこで、宇宙の状況(天気?)をモニタリング、予報しているサイトがあります、その名も「宇宙天気予報」です。
【参考】NICT 宇宙天気予報
https://swc.nict.go.jp/
この情報から、どのように判断するかはまだ勉強しないといけませんが、皆様には参考までにご案内いたします。
2022年8月号「QZSSのCLASの特徴」
準天頂衛星システム(愛称:みちびき)は、米国のGPSのような測位衛星システムの1つで、日本が運営しています。その名の通り、測位衛星が日本の天頂に長く留まるような軌道を描き、地上から見るとGPSのような地球を1周するような軌道でなく、日本からオーストラリア上空を8の字を描くような軌道になっています。
準天頂衛星システムは、その名からQuasi(殆ど)Zenith(天頂)Satellite(衛星)SystemでQZSSと呼ばれており、現在4機の衛星で運用されています。
将来的には7機運用になる予定で、GPSに依存せずに測位できるようになることを目標にしています。
現時点においては、QZSSはGPSと互換性のある測位衛星として、マルチGNSS測位に利用されるケースが多いのですが、他にも様々なサービスを提供しています。
今回はその1つ「センチメーター級測位補強サービス」(CLAS=Centimeter Level Augmentation Service)の特徴についてご説明いたします。
■CLAS(シーラス)の特徴
CLASは電子基準点から収集し計算した補正情報を、QZSSを介して配信するサービスです。
RTKサービス※も補正情報を利用して、高精度測位を実現しています。
両サービスの違いは、補正情報の取得方法が違う事です。
RTKサービスは、インターネット通信などを使って双方向通信(計測場所の概算位置を知らせる、概算位置対応する補正データを取得する)ですが、CLASはQZSS衛星から一方的に発信される補正情報を、受信
することで測位できるすることから、インターネットのような通信機器が不要になります。
メリットとしては、インターネット等の通信が使えない地域での測位が可能であり、例えば山中で電波が届かない場所の除雪などに活用したいというお話などを伺ったことがあります。
デメリットとしては、衛星からの信号を受信することから、受信するデータにタイムラグや容量の上限などがあり、RTKサービスのほうがよりリアルタイムで、情報密度が高い補正情報になります。
また、上記でも触れましたがRTKサービスで使われている補正情報と、CLASの補正情報は同じものではなく、情報密度やフォーマットは異なります。そのため現有する測量機器の多くが、CLASを利用することはできません。
※ネットワーク型RTK、RTKの配信サービスを含めてRTKサービスと表記しております
※本来のRTK測位は、固定局情報(観測データと座標)を無線通信を利用して移動局に送信する仕組みです。その発展形としてここでRTKサービスと表記しているサービス事業者の仕組みができています。
■CLASを使うためには
CLASを利用するためには、補正情報を配信しているQZSSのL6信号を受信し、解析しなければなりません。そのため、CLAS対応するアンテナと受信機が必要になります。
また注意が必要なこととして、CLASで得られた座標値は地殻変動の補正が含まれていない座標値(「今期」座標)になります。地図上の位置「国家座標」に合わせるためには、地殻変動補正が必要になりますので、ご利用の機器に地殻変動補正機能があるかご確認ください。
2022年9月号「LiDER、SLAM」
昨今3次元地図が注目されています。土木建築分野での3次元設計(BIM/CIM活用)、機械(モビリティ)の自動走行などの、様々な産業面での活用をはじめ、災害状況把握の迅速化など防災面でも期待されています。
2022年6月に国土地理院より「LidarSLAM技術を用いた公共測量マニュアル」が発表されており、制度面も急速に整備されています。
その3次元地図を作成するにあたり、ライダー(LiDAR)、スラム(SLAM)という言葉がよく出てきます。
■LiDARとは
Light Detection And Ranging の略です。
端的に説明すると、光の反射を利用して距離を測る技術です。
測量ではレーザースキャナーなどが利用していますし、ドローンにも搭載されているものがあります。最近ではiPhoneをはじめとした、スマートフォンやタブレットにも搭載されたモデルがでてきました。
仕組みとしては、光(レーザー光)を照射、なにかにぶつかって光が反射、反射した光を検出、ここまでの時間を使ってぶつかったものまでの距離を算出します。
距離と光の照射した角度などから、最終的には「点」として結果が得られ、点は位置情報(X,Y,Z)色情報(RGB)などが含まれます。
この「点」の取得を高速に大量に行うことで、「点群」データが出来上がります。
点群のような膨大な点の集まりは、面や3次元の物体のように見えます。
■SLAMとは
Simultaneous Localization And Mappingの略です。
端的に説明すると、得た情報を使って自動的に地図を作り、地図の中で自分の位置を特定する技術です。
前述のLiDARなどから取得した点群データを基に、自動あるいは半自動で地図を作成し、作成した地図情報から自分の位置も特定します。
SLAMはLiDAR以外にも、写真画像など使ったケースもあり、お掃除ロボットのルンバの一部機種にも採用されています。(掃除するお部屋の地図をSLAM技術で作成し、自分がどこを掃除しているか位置を特定します)
■LiDAR、SLAMで作成した3次元地図の位置情報
LiDAR、SLAMを使用することで3次元地図を作成することができますが、その位置情報は、相対的なものでしかありません。
ルンバ用のお部屋の地図のような、私用のものなら問題ありませんが、地図として利用するには、座標値が国家座標に準拠しなければなりません。
そのため標定点を置き、標定点ごと観測することで、標定点の座標を基準に、地図全体の座標を求めることができます。標定点の座標を求めるため事前に測量、あるいはLidarSLAMを使用した機器にGNSS測位機能があり、リアルタイムに標定点の座標を求めます。
また、国家座標に準拠しない(相対的な)座標で3次元地図を作成し、地図作成ソフト上で既知点座標を手入力、あるいは後処理解析を行って座標を求めることもできます。
LiDAR、SLAMでの観測も、国家座標に準拠するジェノバのリアルタイムデータ配信と、後処理データ配信を是非ご活用ください。
2022年10月号「ネットワーク型RTK法による単点観測」
地積測量図には面積の求めるために、土地の境界(筆界)を測量し、座標を求め計算します。
公的な帳簿に登録するため、座標は世界測地系の規格を使用します。
世界測地系の座標を求めるため、作業の大きな流れは以下のとおりです。
既知点を参照に新しい点を設置し、既に設置済であれば既設のものを利用します。(3からスタート)
~国土調査法による地籍測量のおおまかな流れ~
1.国土地理院の電子基準点や基本三角点から、地籍図根三角点を設置
2.地籍図根三角点を参照して、地籍図根多角点を設置
→三角点と三角点をつなぐ点(整合する点)を設置する
3.地籍図根多角点を参照して、測量位置の近くに細部図根点を設置
4.細部図根点を参照して、土地の測量を実施
2の多角点、3の細部図根点は消失していたり、破壊されているケースもあります。
そのため3からスタートしたいのですが、2からスタートになるケースもあります。
■単点観測
ネットワーク型RTK法による単点観測をおこなう事で、上記流れの4だけの作業になり、大きな負担軽減となります。
具体的には、1台のGNSS受信機で直接土地の筆界を観測※して、座標を求めます。
(ここで言う単点観測とは、他の既存点と無関係に測点を設置し、測点の位置を求めることを示します)
※電子基準点RTKやRTK、あるいはVRSを使用し、FIX解10エポック以上を2セット観測し、観測値を平均して求めます
単点観測で観測した座標は、国土地理院の電子基準点座標に準拠しており、世界測地系の座標となります。
精度を保つことができることから、1から3の段取りが不要になりました。
但し、既知点を使った点検作業は行わなければ、なりません。
上空が開けている田畑の場合は良いかもしれませんが、建物の土地の場合は測量位置が建物や樹木などでGNSS信号の受信が難しいケースも想定されます。その場合は登記多角点を単点観測で設置し、トータルステーション併用で計測する方法が想定されます。
それでも、作業負担軽減が期待できます。
なお地籍測量(国土調査法)と地積測量(不動産登記法)は、作業要領が異なるのでご留意ください。例えば登記多角点の設置方法は、地籍測量作業規程準則に付随する単点観測法のマニュアルを準用した内容になっています。内容に応じてご利用下さい。
2022年11月号「PPP、PPP-RTK、DGPS」
今回はPPP-RTKとPPP、DGPSの違いについてご説明いたします。
ちなみにPPP-RTKは、日本の測位衛星システムであるQZSS(みちびき)が提供している、センチメーター級測位補正サービス(CLAS)に採用されています。
■PPPとPPP-RTK
PPPとはPrecise Point Positioning(高精度単独測位)の略です。
その名の通り、単独で高精度な測位が可能な方法になります。
衛星から信号さえ受信できれば、地上のネットワーク通信(双方向通信)や基準局の設置も不要になり、アンテナ+受信機の1台で測位が完結します。
PPPとPPP-RTKでは、衛星から受け取る補強情報に違いがあります。
衛星から受信機し位置を求めるまで、補正すべき誤差要因は以下3つの要因に分けられます。
A)衛星そのものの誤差
B)衛星から受信機間に発生する誤差
C)受信機の誤差
PPPはAの補強情報を受信、PPP-RTKはABの補強情報を受信します。
Aの補強情報は、どこの海上でも陸地でも利用でき、世界共通のものになります。しかしAだけの補正ですと、BとCが補正できない分、精度が悪くなります。
Bの補強情報は受信機がどこにあるかで、違ってくる情報になります。
例えば、ある衛星から日本までと中国まででは、途中の大気層の状態が異なり、同じ誤差量ではありません。そのためCLASは日本用の補強情報を配信しています。
■PPP-RTKとDGPS
DGPSは位置が既知である基準局での観測データから、既知点との差異を補強情報(デファレンシャルデータ)として生成、未知点の観測位置に送付することで、未知点の観測データを補正します。これにより、前述の誤差要因ABに対して補正を行っています。
PPP-RTKとDGPSは誤差要因ABの補正を行い、基準局が必要という意味合いでは同じですが、精度の面はPPP-RTKのほうが良くなります。
PPP-RTKとDGPSの違いは2点あります。
1つは位置を求める際に使用する距離の算出方法(補正方法)が違います。DGPSは信号に定期的なタイミングで含まれているコード使って距離補正する(コード疑似距離)ものに対し、PPP-RTKは電波(搬送波)の位相差を使用して補正します。
位相差のほうがコードより詳細な情報のため、より高精度な補正が可能となります。
もう1点は基準局を使った補強情報の特性です。
PPP-RTKは複数の基準局における観測データを用いて、サービス地域をカバーします。例えばCLASは、全国を12領域に分けて、それぞれのブロックで30点程度の基準局を使って補強情報を作っています。
DGPSはある基準局1点で観測したデータに基づく補強情報ですので、基準局から離れると測位の誤差は大きくなります。
2022年12月号「測量だけじゃないネットワーク型RTKの活用分野(エンタメ)」
今回はネットワーク型RTKを活用したサービスで、利用用途に特徴的な事例がありましたので、ご紹介したいと思います。
■ネットワーク型RTKサービスを活用した自動音声ガイド実証実験
https://www.jenoba.jp/case/20221004/
観光地などで自動音声ガイドが使われているケースを見かけます。
自動音声ガイドもさまざまな仕組みがあると思われますが、利用していると時折説明対象でないものを説明してしまうこともあります。
今回のガイドシステムは、端的にご説明すると2つのGNSSアンテナがあり、それぞれの位置を高精度測位し、位置の関係から体の向きを算出します。
(例えば右肩の位置と左肩の位置を測位し、位置の関係から体の向きを算出するといったイメージです)
これにより、体が向いている方向の対象物の説明をおこなうことができるようになり、よりガイドによる没入感を高めることが期待できます。
こういったエンターテイメントの分野においても、ネットワーク型RTKが活用されるケースがでてきました。今後の活用が非常に楽しみです。
また特徴的な事例がございましたら、ご紹介させていただきます。
2023年1月号「元期と今期、公共測量は元期、CLASは今期」
GPSをはじめとした測位衛星から測位した結果、まず緯度経度で位置が求められます。
この時測位した位置は、測位した”今”の緯度経度になります。
これが「今期」(こんき)の位置となります。
ご存知の通り陸地は常に動いています。(特に日本は複雑です)
極端な話ですが、昨年の東京タワーと今の東京タワーの位置は違います。
さて位置情報を基に地図を作成するのですが、刻々と変化する位置を反映することは非常に難しいです。そのために基準となる時を定め、その時の位置に変換する必要があります。
基準となる時の位置が、「元期」(げんき)の位置となります。
(ちなみに2023年1月時点で基準となる時の位置は、測地成果2011(JGD2011)の位置となります)
そして元期の座標が「国家座標」となり、公共事業の設計図等など幅広く利用されています。そのため設計図から現地の位置を出す際、「今期」で位置を出した場合では、違う位置になってしまいます。
ネットワーク型RTKで観測された場合は、元期になるのでよいのですが、中にはCLASのように今期で測位されるものもありますのでご注意ください。
2023年2月号「基線長が長いとどうなるか」
高精度測位を実現するRTK方式は、基準局があってこそ実現されます。
基準局は既設のもの、新設(仮設)のものといった物理的なものから、弊社のVRSサービスのような仮想のものもあります。
基準局から測位する位置(観測点)まで距離を「基線長」といいます。
一般的に基線長が10kmを超えると、精度劣化が始まると言われています。
何故でしょうか。
基準局は誤差要因消去の役割があります。
測位において様々な誤差要因がありますが、基線長に係るのものは地球の電離層・対流圏による誤差です。
ご存知のとおり測位において、GPSなどの衛星から発信された電波を地上の我々に受信・解析し位置を求めますが、電波が大気層を通過する際、電離層と対流圏で電波速度に影響が発生します。
電離層は自由電子とイオンの層で、太陽活動によって電子の密度が変わります。密度が高いと電波の速度遅延が発生します。対流圏は乾燥している大気と湿度のある大気の境目で、水分量の違いなどにより電波の速度に影響がでます。
さて基線長が長くなるほど、精度劣化する話に戻します。
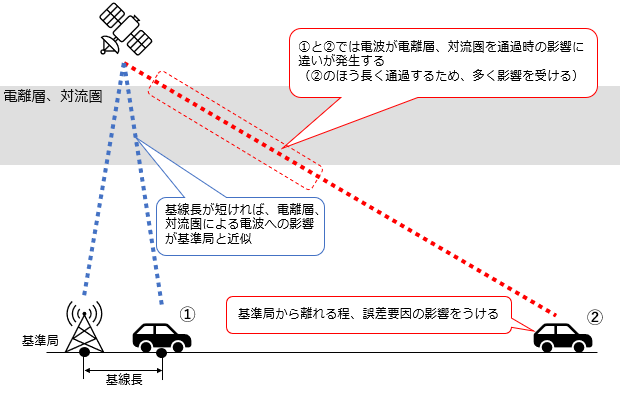
基準局が衛星から電波を受けて測位にあたり、衛星と基準局間の電離層、対流圏の影響をうけます。この誤差要因を消去して、精度を高めるのですが、基準局に影響している電離層、対流圏の誤差が、観測点での電離層、対流圏の誤差と近しいものでないと誤差を消しきれません。
図のように基準局から遠く離れる(基線長が長くなる)と、観測点の電離層、対流圏の影響が大きくなり、基準局による誤差消去が利かなくなってくるため、精度劣化します。
ハンドオーバー機能
例えば弊社VRSサービスでは、この基線長の対策として「ハンドオーバー機能」を用意しております。
この機能は最初の観測に使用した基準点(仮想点)から10km離れると、自動的に新たな基準点を近傍に生成することで、基線長を10km超えさせないようなものです。
移動しながら観測を行うようなケースは、基線長について考慮いただけるとよいかもしれません。
2023年3月号「1周波、2周波、3周波」
GNSS測位は、衛星からの信号を解析して位置を求めます。
衛星の信号は、地上の受信機に到達するまでに地球の電離層を通過します。
通過の際に、層内の電子数の影響などから信号の速度が遅延し、誤差の要因となります。
(信号の速度×信号の受信機までの到達時間で距離を算出すると、実際の距離と乖離した値になります)
このとき、電離層によって生じる遅延量は、信号の周波数に関係します。
したがって、複数の周波数帯を使用してGNSS測位を行うことで、誤差となる遅延量の測定が可能となり、より高精度な測位を行うことができます。
各国の測位衛星システムは下図のような信号を配信しています。
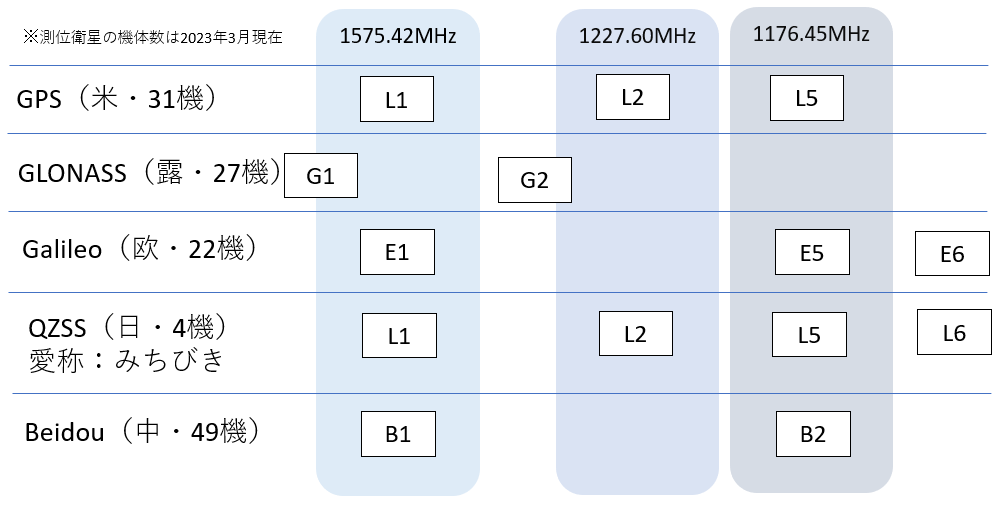
各衛星システムから周波数1575.42MHz付近の搬送波を配信をしています。(L1帯と呼ばれています)
一般的にこのL1帯の搬送波を使用して測位することから、「1周波」測位と言われます。
2周波、3周波
さて図から御察しの通り、1227.60Mhz帯(L2帯)、1176.45MHz帯(L5帯)も衛星システムから配信されています。
L1帯ともう一つの周波数帯を使用して測位解析することを「2周波」測位と言われています。
L1+L2でも、L1+L5のいずれの組み合わせでも問題ありません。
さらに、L1+L2+L5を使用した場合は「3周波」となります。
昨今の高精度測位は、おおむね2周波が使用されています。
2周波による観測では、測位衛星から配信されたL1とL2の信号を使用し、それぞれが同じ伝搬経路で電離層を通過します。
L1とL2の周波数が違うことから、各々の信号で異なる遅延量が測定され、この測定値に基づいて、電離層による遅延量を補正することができます。
すべての衛星がL5信号を出していない
米国のGPS衛星が最初に打ちあがったのは、40年以上前になります。
その間、衛星は更新されているのですが、まだ古い衛星も残っており、古い衛星はL5帯の信号を発信していません。
つまりは、全てのGPS衛星がL5帯の信号を発信しているわけではなく(17機が配信しています)、3周波を使う場合は配信している衛星が上空にあるタイミングを計画して測位する必要があります。
2023年4月号「GNSS測位の高さについて」
GNSS測位は、衛星からの信号を解析して位置を求めます。
その位置には高さも含まれており、GNSS測位そのもので求められる高さは「楕円体高」となります。
地球が北極南極を端とする軸で自転しているので、球体がちょっと膨らんで楕円体になると考え、その楕円体の表面から測器のアンテナ中心までの鉛直方向の長さになります。
求めた楕円体高は、「標高」ではありません。
標高は平均海面(ジオイド)からの高さになり、以下のようになります。
標高 = 楕円体高 - ジオイド高
ジオイド高については、国土地理院より「日本のジオイド2011」というファイルで情報公開しており、測量機器に同ファイルを設定することで標高が求まります。
【参考】国土地理院 ジオイド・モデル「日本のジオイド2011」
ジオイド高は東京と沖縄では異なる
ジオイド高は同じ日本でも、違ってきます。
ジオイド高に影響するのは重力で、重力が強い地域は水面が地球の中央に引き付けられてジオイドは低くなります。
重力は「引力」と「遠心力」でできています。
引力は地球の中心に向けて引き付けられる力になりますが、地中に重い物体などがあると、より引力が強くなります。
そのため、地球上の引力も均一ではありません。
遠心力は地球が自転していることから、回転の中心から外へ出そうとする力です。地球上では赤道の上が一番強い遠心力がかかる場所となります。
(回転軸に対して一番円周が長いため)
重力は「引力」と「遠心力」の合力になります。
引力も遠心力も場所によって違うため、地球上の重力も均一ではありません。
新しいジオイドの整備が始まる
ジオイドは重力と関連することから、重力を計測することでジオイドを求めることができます。
令和元年より「航空重力測量」を実施しており、日本各地を高い精度で重力値を観測し、高い精度のジオイド値が整備されようとしています。
(計測は概ね完了しており、令和5年より整備が行われるとのことです)
高精度のジオイド値を利用することで、GNSS測位の高さの精度も高くなり、利用・活用が拡大することが期待できます。
2023年5月号「DOP値、マルチパス、仰角マスク」
衛星測位をするにあたり、たくさんの衛星が上空にあれば精度高く、素早いFIXが期待できますが、必ずしもそうではありません。
今回のDOP値、マルチパス、仰角マスクが、測位に影響してきます。
DOP値
Dilution of Precisionの略です。観測時の衛星配置による測位低下率を意味しています。
この数字が小さいほど測位精度がよく、大きいほど精度が悪いことを示します。
衛星測位時に上空の衛星が、東西南北にまんべんなく配置されているのが理想的で、例えば使用できる衛星が北側に多く、南側にほとんどない配置の場合、DOP値が悪くなります。
具体的には以下のように測位精度に影響します。
測位精度 = 衛星と受信機間の距離測定誤差 × DOP値
つまりは、DOP値は1に近いほど精度が高いと言えます。
3を超えてしまうと、観測には向いていない配置と考えています。
DOPは以下のように様々なものがあり、位置座標や緯度経度を求めるにあたっては、PDOPを考慮するとよいです。
GDOP:幾何学的精度低下率
HDOP:水平精度低下率
PDOP:位置精度低下率
RDOP:相対精度低下率
TDOP:時刻精度低下率
VDOP:垂直精度低下率
観測したい日時、場所(都道府県)のDOPについては、弊社から簡単に検索できるサイトを用意しておりますので、どうぞご活用ください。
衛星飛来予測:https://my.jenoba.jp/pas/planning/planning.html
マルチパス
衛星測位は衛星からの電波を受信し、解析して位置を求めます。
観測する場所が開けている場所は問題ないのですが、周囲に高い樹木や壁、ビルなどがあると電波が回折、あるいは反射して受信することがあります。
このような影響により誤差が生まれ、これをマルチパス誤差と言います。
ちなみに観測する場所の真上、天頂に衛星があれば、両側が建物でもマルチパスの影響少なく電波を受信できるため、準天頂衛星「みちびき」は、日本の天頂付近をゆっくり飛来するように運用されています。
仰角マスク
観測場所から衛星を見ると、上空に存在するイメージをお持ちでしょうか?
衛星も月のように地平線から登り、地平線に沈んでいきます。
(そうでない静止衛星というものもありますが、今回は対象外にいたします)
例えば地平線近くにある衛星を利用したとしましょう。
地平線の電波は概ね何かに遮蔽されて届かない、届いたが回折等で誤差要因の大きい電波となるのではないでしょうか。
マルチパスの影響をうけた電波を使って解析することで、FIXが遅くなり、誤差も大きくなってしまいます。
そこで、地平線を0度、天頂を90度として(これを仰角と言います)、ある角度までの衛星を使用しない「仰角マスク」という機能がほとんどの受信機についています。
仰角マスクを使うことで、マルチパスの影響をうけた信号を排除することができ、早いFIXと高い精度が期待できます。
一般的には仰角は15度設定が多く、仮に75度など設定にすれば天頂近くの衛星だけを利用するので良いような気がしますが、使用できる衛星数やDOP値に悪影響を及ぼしてしまいます。
※日本の測量の世界では15度ですが、世界的には10度が一般的のようです。
2023年6月号「RTK方式、RRSとVRS」
展示会会場にGNSSアンテナや、GNSS測位関連で「RTK」という言葉がよく見受けられるようになりました。測量や建設分野以外にも、GNSSの利活用が目立ってきたのではないでしょうか。
(GNSS:Global Navigation Satellite System、GPSをはじめとした各国の衛星測位システム)
今回はRTK方式(Real Time Kinematic)について、大きくRRSとVRSという分類に分けて、特徴をご説明したいと思います。
RTK方式とは
測位衛星からの信号を利用して位置を求めることができるのですが、その場合、衛星の信号発信から受信まで、さまざまな誤差要因があるため、単独の測位信号だけ(コード疑似距離)ではメートル級の精度となります。
そこで、正確な位置が分かっている点(基準局)を利用します。
基準局で同時刻に計測した結果は、近距離では誤差とみなせる要因を含んでおり、本来の正確な位置との差分を求めることで、未知点での観測データを補正し、測位精度をあげることができます。
これを相対測位と言い、さらに衛星との距離計算において、コード疑似距離だけでなく、衛星信号の搬送波を利用することで精度をさらに高める方式を、リアルタイムキネマティック(RTK)測位方式と言います。
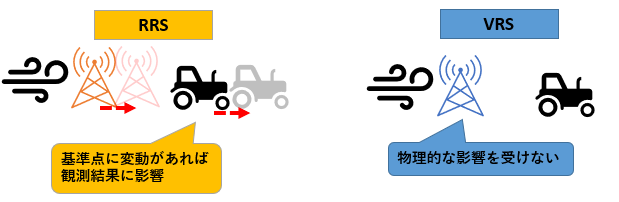
RRSとVRS
前述に「基準局」の話がありましたが、この基準局が国土地理院の電子基準点や、民間で設置したアンテナ施設、現場で三脚を据えて一時的に設置したものなど、物理的な施設を基準局に使っているのがRRS(Real Reference Station)です。
それに対して物理的な施設を準備することなく、仮想的に基準局を生成させるのがVRS(Virtual Reference Station)です。例えば当社のVRSは、測位位置の近傍に仮想的な基準局を生成するのですが、生成にあたって測位位置周辺にある、国が管理する電子基準点の観測データを複数使用し計算を行っています。
RRSは目に見える基準局のため分かりやすいのですが、設置の手間や既設のものを管理する手間があります。基準局がずれてしまえば、その分観測結果もずれてしまいますので、日々の管理が必要になります。
また、単一の基準局を使っているため、対象の基準局が停止したり、たまたま遮蔽されて衛星信号がとれなくなったりすると、測位できなかったり、精度劣化が著しくなる場合があります。
VRSについては仮想のため、設置も管理も不要です。
生成される基準局データも、複数の基準局データより作成しているので、安定してご利用いただけるメリットがあります。
2023年7月号「ネットワーク型RTKの定義」
GPSをはじめとするGNSSを使った高精度測位の方式として、既知点を基準局として使用するRTK方式があります。
RTK方式にて基準局のデータを観測側の機器が受信するのですが、情報連携の方法がインターネット経由でデータ連携するため、このような方法を採用しているRTKは「ネットワーク型RTK」であると認識されているケースが見受けられます。
しかしながら、公共測量の作業規程(準則)において「ネットワーク型RTK」は明確に定義されていて、データの転送方法でなく、基準局のデータに複数の基準局(ネットワーク)のデータを使用しているものが、「ネットワーク型RTK」とされています。
参考までに、公共測量の作業規程(準則)で、このことに関する定義が記述されている箇所を抜粋いたします。
~~~~~
ネットワーク型RTK法は、位置情報サービス事業者(国土地理院の電子基準点網の観測データ配信を受け、かつ、3点以上の電子基準点を基に、測量に利用できる形式でデータを提供している者をいう。
以下同じ。)で算出された補正データ等又は面補正パラメータを、携帯電話等の通信回線を介して移動局で受信すると同時に、移動局でGNSS衛星からの信号を受信し、移動局側において即時に解析処理
を行って位置を求める。その後、複数の観測点に次々と移動して移動局の位置を即時に求める観測方法である。観測終了後に位置情報サービス事業者から補正データ等又は面補正パラメータを取得することで、後処理により解析処理を行うことができるものとする。
【出典】作業規程の準則 第37条2 二 ヲ
https://psgsv.gsi.go.jp/koukyou/jyunsoku/pdf/R5/R5_junsoku.pdf
~~~~~
今回のテーマに沿って要約しますと、「公共測量で利用できるネットワーク型RTKは、国土地理院の電子基準点3点以上のデータから生成された補正データを使用したRTK」、ということになります。
2023年8月号「VRSを行うためにはどんな機器が必要か」
VRSをご利用するにあたり、大きくはGNSSアンテナ、GNSS受信機、コントローラー、通信機器が必要になります。
測量機器で言えば、GNSSアンテナとGNSS受信機が一体になっているものが多く、通信機器はコントローラーに通信機能がはいっていたり、コントローラーを携帯電話のデザリングやモバイルルーターなどに繋いでご利用になっているのではないでしょうか。
ドローンなどは、GNSSアンテナ、GNSS受信機が機体に内蔵(あるいはオプションで取付)されており、コントローラーであるプロポにSIMを挿したり、携帯のデザリング、モバイルルーターなどでネットワーク接続してご利用いただいていると思います。
この機器を踏まえて、位置を求めるまでの処理の流れを以下のような図にしてみました。
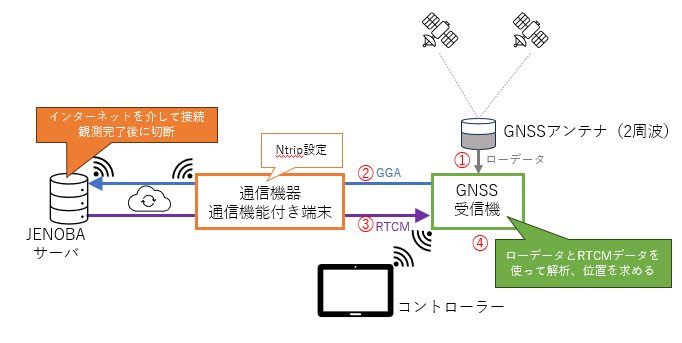
①利用者が受信衛星信号のみで取得した概算位置を求めます
②上記で求められた概算位置を弊社サーバに発信します(GGA送信、NMEA形式フォーマット)
弊社サーバに送信の際、Ntrip方式で接続(ログイン)します
③受信したデータを基に、送信された概算位置の基準局データを作成し(仮想点)、利用者の受信機に送信します(RTCM形式)
④GNSS受信機は基準局データと①のデータを使用して解析を行い、高精度な位置を求めます
弊社専用通信機器「CPTrans」は?
弊社専用通信機器のCPTransを使用する場合、図の「通信機器、通信機能付き端末」がCPTransに置き換わります。
CPTransの場合は弊社サーバへの接続情報が設定済ですので、電源を入れるだけでサーバ接続されます。(CPA方式)
CPA方式の特徴として、KDDIの閉域網(専用線ネットワーク、VPNのようなイメージ)を使用した通信となり、セキュリティ面も確保されます。
CPTransの通信費用は月額2,000円で無制限に利用できますので、新たにGNSS機器を後付けする仕組みや、GNSS機器を組み込んだ機器開発の際には、ご利用を検討いただけると幸いです。
2023年9月号「固定局を使ったRTKのメリデメ」
高精度測位を実現するRTK(Real Time Kinematic)測位ですが、位置が分かっている点(基地局)と、位置を求めたい点を同時にGNSS観測を行い、基地局の観測結果から位置を求める測位方法です。
基地局ですが、建設現場に三脚で設置する、施設を建てる、既存の建物・施設に設置するなど行われていると思います。ここでは「固定局」という表記にします。
これに対して当社のようなネットワーク型RTKにおいては、設備や施設を用意せず、仮想的に生成した基準局である「仮想点」を使用して、測位を行います。
今回は「固定局」と「仮想点」のメリットデメリットをまとめました。
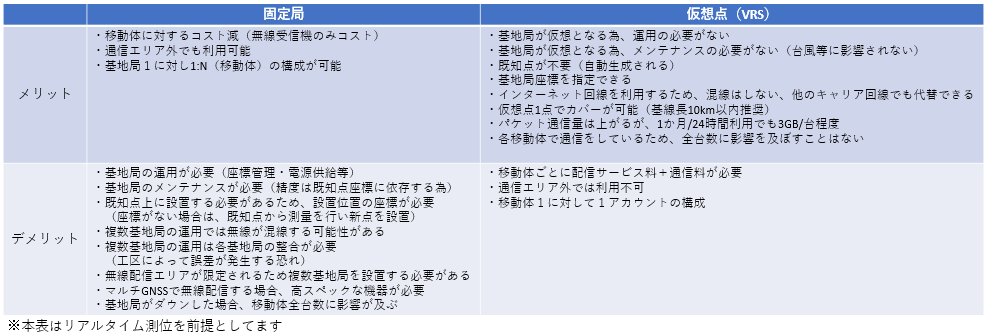
固定局のメリットとしては、「安い」「わかりやすい」といった印象をお持ちではないでしょうか。
「安い」というイメージですが、まず固定局設置にあたり既知点が必要となり、ない場合は測量を行って新点を設置しなればなりません。
次に設置後には固定点がずれないように管理を行ったり、仮に故障は不具合が発生して復旧まで発生するコスト(例えば作業員が作業できなくなるなど)まで視野に入れると、仮想点にもコスト面でのメリットがあるのではないかと、考えております。
2023年10月号「デジタルツイン」
■AR/VR
さて早速ですが、「AR/VR」は空間を表現する技術の包括的な総称になります。
AR→Augmented Reality(拡張現実)
VR→Virtual Reality(仮想現実)
端的な説明となりますが、VRはすべてCGによって空間を表示します。
ARについては、現実空間とCGによる空間が融合した形になります。
言葉面からは分かりづらいので、当社事例からARを引用します。
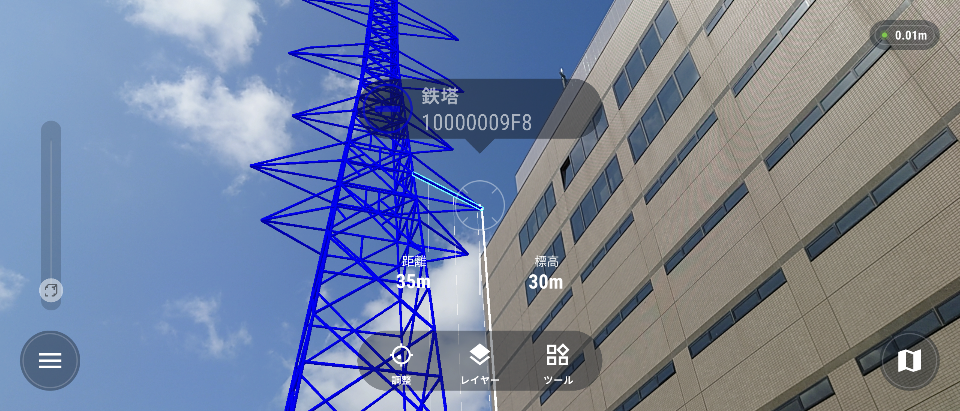
※当該事例はこちら
写真は、これから建設する鉄塔の設計データを、現実空間の映像にCGで再現したもの付け加えたものになります。これがAR技術になります。
ARにすることで図面に比べより分かりやすく、現場作業員・管理者・地権者との調整などに、非常に有用です。
例えば、鉄塔が建物に接触しているかなどが確認するため、この鉄塔位置は正確な位置に再現されなければいけません。
この位置の再現に、ネットワーク型RTKが使用されています。
■デジタルツイン
「デジタルツイン」は、現実空間の瓜二つをVRで再現するものです。
瓜二つの空間なので、例えば再現した建物のサイズは現実のものと同一になります。
「メタバース」という言葉があります。こちらもVRで再現した空間になりますが、メタバースは仮想空間内のアバター(自身の分身)がコミュニケーションをとる事に主眼が置かれているので、建物のサイズは同一である必要はありません。
デジタルツインは、社会基盤整備の共通基盤としての活用が期待されています。
例えばデジタルツイン内にビルを建設して、建設したことにより日陰がどのように生まれるのか、デジタルツイン空間に大雨を降らせて、どこまで浸水するかなどシュミレーションを行う、その結果から実際の空間へ対策を行うなどの活用が考えられます。
さらには、上記のような建設分野や防災分野だけでなく、様々な分野での活用が見込まれています。
■測地系が肝
このデジタルツインを構築するにあたり、3次元点群データを取得し、活用することも考えられます。
点群データは以下の写真のような点の群れで、点1つ1つが位置(緯度、経度、楕円体高)を持っています。
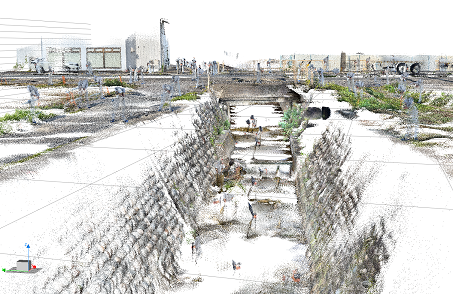
※当該事例はこちら
デジタルツインは表面上の建物・道路だけでなく、地下埋設物なども対象にしています。
地下埋設管などをデジタルツインに再現することで、建物の設計の際に建物の基礎が埋設管にぶつからないこと確認できたり、実際の建設工事の際に埋設物位置がわかるため、地面を掘削による埋設管破損の事故を防ぐことができるなどの利点が生まれます。
デジタルツイン生成にあたり、地上データに埋設管などのデータを付け加える際、水道管やガス管などのデータがそれぞれ測地系が違うことにより、実際の位置が異なったものが、生成される恐れがあります。
東京都のデジタルツインプロジェクトにも課題として挙げられていましたが、将来的には測地系は現行の測地系であるJGD2011に統一されると思われます。
当社のサービスを使用して、点群データの位置を補正することでJGD2011の測地系にあった成果を得ることができます。写真の事例にもあるように、測量の成果座標値に合致する形で3次元点群データを取得することができます。
2023年11月号「補正データの品質チェック」
GPSをはじめとする測位衛星、国土地理院が管理するGEONET(電子基準点網)は、生活のインフラとしてサービスを止めないよう運用されています。
しかし、いずれも機械であるゆえに定期的な点検や調整、機器の更新があり、また自然現象にも影響されます。自然現象と言えば台風などを想定しますが、電子基準点は停電になっても、内部バッテリーでしばらく稼働するため止まりません。電子基準点にとって、意外な自然の脅威は「木の成長」です。
電子基準点はよく公園等に設置されることが多く、木々が生い茂る頃に枝葉がアンテナにかぶって衛星信号の受信に差し支えることがあります。
その後、枝葉は剪定していただけるのですが、「受信に差支えたその時」ではありません。
(枝葉の話をしましたが、他にも周囲にアンテナ受信に影響する建物がたった、積雪等の事象にも影響されることがあります)
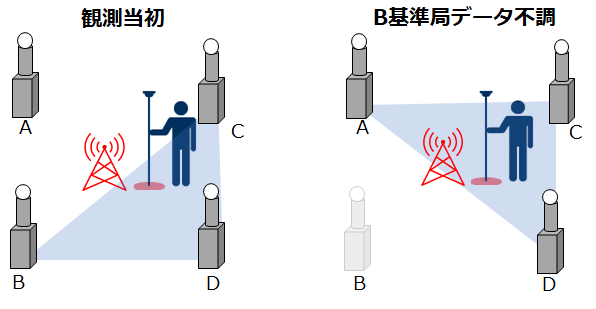
調整中の衛星信号の受信する、衛星信号受信状態の悪い電子基準点を使用して観測すると以下のようなことが起きます。
・FIXしない
・FIXが遅い
・FIXしても精度が悪い、測位結果のバラツキが大きい
ユーザー様の対応としては、衛星起因であれば対象の衛星システムから受信しないようにする等の対策をされています。
(弊社サービスであればマウントポイントを変更する)
電子基準点起因であれば、当該電子基準点を使用しないように観測します。
■当社の品質チェック
当社では24時間365日、電子基準点の受信状況を監視しています。
そこで観測状態が良好でない電子基準点があれば、VRSの配信データにて仮想基準点の生成に利用しない運用に変更したり、電子基準点運用管理者様へのご確認等を行っています。
もちろん、既にメンテナンス予定が決まっている衛星システムや電子基準点については、事前に配信データ生成に利用しないよう、調整しております。
このような運用を継続することで、品質の安定した配信サービスを継続できるように努めてまいります。
2023年12月号「後処理解析の特長」
後処理解析は、「後処理キネマティック」PPK(Post ProcessingKinematic)方式とも言います。
RTKは「Real Time Kinematic」の略で、その名の通りリアルタイムにキネマティック方式で位置補正行うに対して、後処理キネマティックは「後で」補正を実施します。
PPK、RTKいずれもcmレベルの観測精度を実現することが可能です。
RTKには基準局が必要で、複数の基準局から仮想で基準局を生成している方式がVRS(Virtual Reference Station)になります。
簡単ですが、PPKの具体的な解析の手順は以下のようになります。
1)ドローン等で観測を実施する
2)例えば弊社サイトから、上記観測時間かつ観測位置に近い基準局の後処理データ(Rinexデータ)を入手する
3)ドローン観測データと、後処理データをPPK対応ソフトウェアやSfMソフトウェアに取込み解析を実施し、位置(座標)を求める
■PPKとVRSの比較
まずは、リアルタイムのVRSと、後処理のPPKの比較表を作成してみました。
それぞれの特長があります。
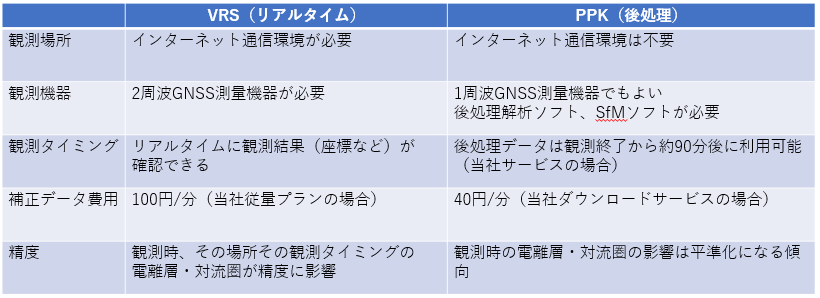
観測用途や、観測場所の環境に合わせて使い分けすることができます。
リアルタイムは現場で観測成果(座標)を確認できる、すぐに結果が得られるメリットがありますが、後処理はインターネット通信できない地域での計測を可能にします。
2024年1月号「測量以外の活用事例ご紹介」
今回ご紹介する事例のポイントとしては、アンテナを2つ搭載し、2ヶ所測位することで、アンテナが搭載されているものの向きが分かるという点がポイントです。
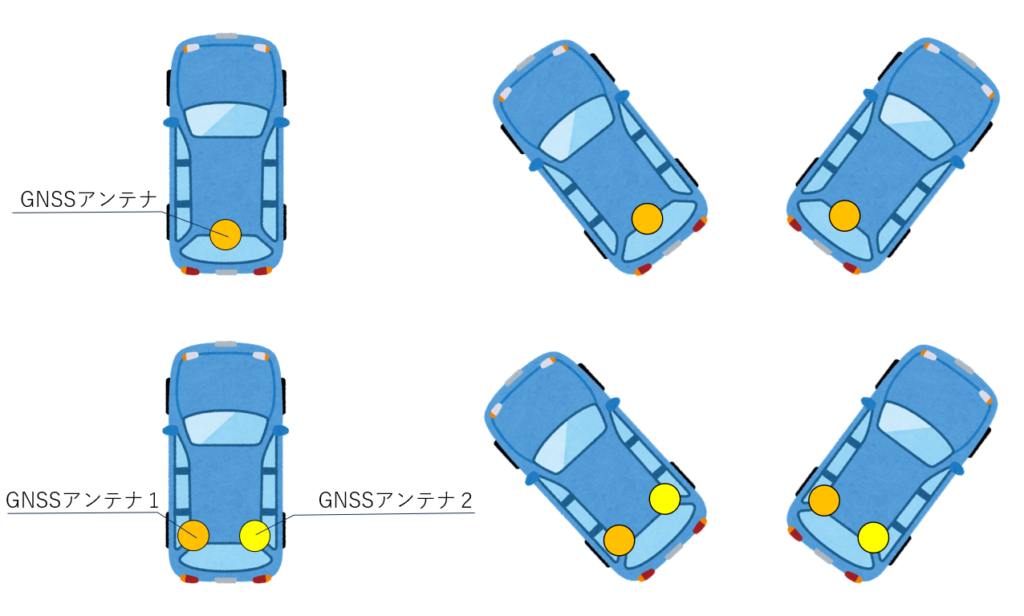
建設機械でICT施工をするショベルカーなどをみると、2つのアンテナがついているのが分かります。
さらにアームのセンサーなどからバケット位置を算出し、マシンガイダンスやマシンコントロールを実現しています。
この2ヶ所測位する仕組みを、観光分野に活用した事例をご紹介します。
【事例】ネットワーク型RTKサービスを活用した自動音声ガイド実証実験
2つのアンテナとGNSS受信機をウェアラブルデバイスにし、ネットワーク型RTKを利用することで、高精度で立ち位置と体の向きを算出することができます。
これにより、観光客のいる位置と向いている方向のものに対して、観光案内ができるようになりました。
本技術は別のテーマパークでも、活用を検討してる模様です。くわしくはこちら。
また、観光案内だけでなくモータースポーツにおいて、競技車両に2つのアンテナを搭載し、事前に作成しておいたデジタルツインの空間内で車両位置・向きを再現し、デジタルツイン内でモータースポーツ観戦するといった活用がありました。
くわしくはこちら。
今後も新しい活用方法がございましたら、ご紹介させていただきます。
2024年2月号「強靭化されていく電子基準点網」
電子基準点は国内に約1300点あり、約20km間隔で設置されています。
Googleマップなどで「電子基準点」と検索すると、地図に表示されます。
意外と最寄りに設置されているかもしれません。
電子基準点の役割と一つとして、複雑にプレートが入り組み、地震や火山活動が活発な日本の地殻変動の監視があります。そのため、大地震の発生が懸念される東海から南海トラフ周辺の地域に、より多くの電子基準点が設置されています。
他の役割は皆様がよくご利用いただいている、測量の基準点としての利用、または弊社などを介してリアルタイムの位置情報サービスの利用になります。
この電子基準点のネットワークと、監視している中央局を合わせて、「GEONET」と言います。
■地震後座標成果の公開停止
今回の能登半島地震よって大きな地面の変動があり、地震前から水平方向に2m、鉛直方向に4m近く動いた場所もあります。
そのため地震前の情報では、前述の「測量の基準点」として利用が適当ではないため、公開停止になっていました。
(現在は一部電子基準点を除いて公開されました)
公開停止の間も電子基準点そのものは動作しており、弊社会員サイトの「基準点衛星情報」で各電子基準点における衛星情報受信の実績が検索でき、例えば珠洲の電子基準点は以下の通りです。
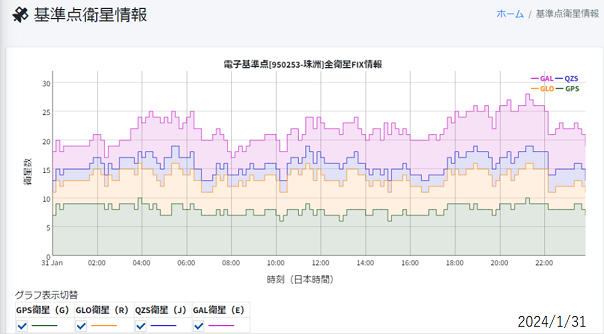
そのため、リアルタイムの位置情報サービスがご利用いただける状態にあります。
■強靭化されていく電子基準点網
位置情報のインフラとして非常に重要な電子基準点ですが、昨今の激甚化する気候変動等にも耐えられるよう対策が施されています。
具体的には日射熱による躯体歪み対策や浸水対応のため躯体を二重管化、停電対策としてバッテリー等の予備電源を搭載しております。
また現在でも通信の冗長化・省電力化、携帯電話の電波の影響を受けにくいGNSSアンテナの交換が進められています。
このような施策があり、弊社のような補正情報配信サービスはより安定したサービスの提供が可能となっております。
2024年3月号「基線長と精度の関係について」
RTK観測を行うためには、基準局が欠かせません。
基準局タイプには施設に据え付けられたものや、既設の電子基準点などがありますが、基準局の性能や状態によって測位精度への影響が異なります。
また、基準局の性能や状態が良くても、基準局と観測点位置の距離によっても影響があります。
この基準局と観測位置までの距離を、「基線長」と言います。
観測を行うにあたり、GPSをはじめとした測位衛星から発信された信号を観測点で受信するのですが、信号は地球の電離圏・対流圏を通過することで、信号遅延が発生します。
RTK観測の場合、基準局との差を取ることで、その影響を打ち消すことができます。
電離圏・対流圏の状態は場所によって異なるので、基線長が長くなるほど、異なった影響を受けることになり、そのため精度に影響する誤差を消しきれなくなります。
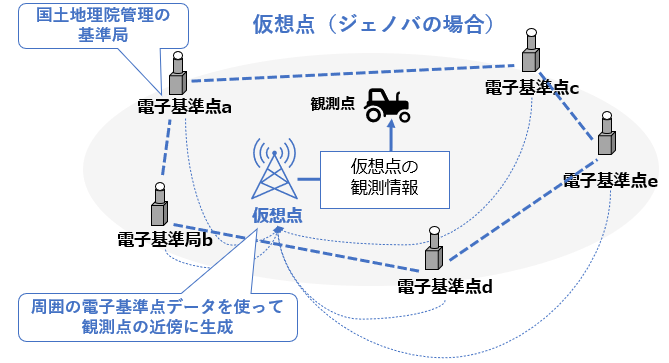
VRSは使用時に自動的に仮想点として観測点近傍に基準局が生成されます。
そのため、自ずと基線長は短くなります。(これが安定した精度を供給できる点になります)
VRSは複数の基準局を使用して生成しているため、ネットワーク型RTKと言われます。
今回は基線長による影響を分かりやすくするため、電子基準点RTKのような、1点を基準局にしたRTK(以下、実RTK)の事例についてご紹介いたします。
※VRS、ネットワーク型RTKについては、観測地点周辺の複数の基準局を使用しているため特徴が変わってきます
具体的にどれぐらい精度劣化するか、実際に観測してみました。
以下、観測データはVRSによる観測結果です。
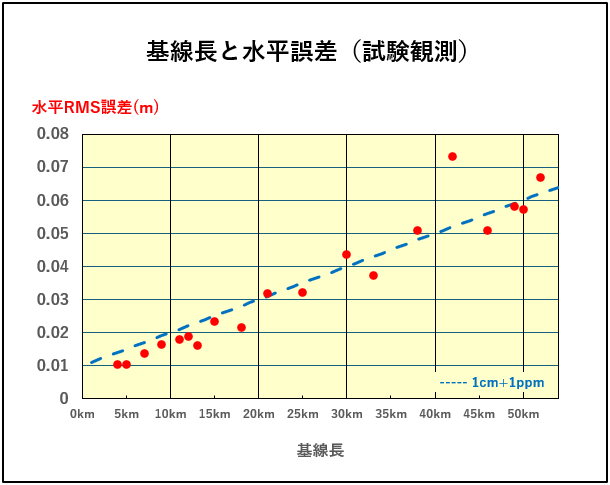
結果、とても良好な状態で観測できました。
実際は、その時の電離圏・対流圏の状況、アンテナ・受信機の性能や、測位時上空の衛星配置、観測地点周囲の状況により違ってきますので、傾向として見てください。
水平誤差と基線長の関係はRTKにおいて、
観測開始地点の水平誤差+1ppm未満
という特徴と言えるのではないでしょうか。
GNSS受信機カタログの仕様等にも、精度について記載されている場合もありますので、参照にしてください
実際の観測環境を踏まえると。測量などで水平誤差2cm内の高精度を求める場合は、やはり基線長は10km以内であることが望ましいと考えます。
■実RTKの基準局切替にご注意
実RTKで観測を行うにあたり、基線長による影響の対策として基準局を切り替える方法があります。観測開始時の基準局から、近くにある基準局に切り替えることで、基線長を短くすることができます。(ハンドオーバーといいます)
切り替えることにより、観測地点付近の新たな電離圏・対流圏による影響を打ち消すことができます。
しかし切り替わり時に、観測値が大きく変化してしまうことがあります。
これは基準局の施設の特徴や設置状況による、電離圏・対流圏以外の物理的な影響によるものです。
なおVRSについても基準局(仮想点)をハンドオーバーさせることがありますが、観測開始時の仮想点と整合性があり、シームレスに切替が行われています。
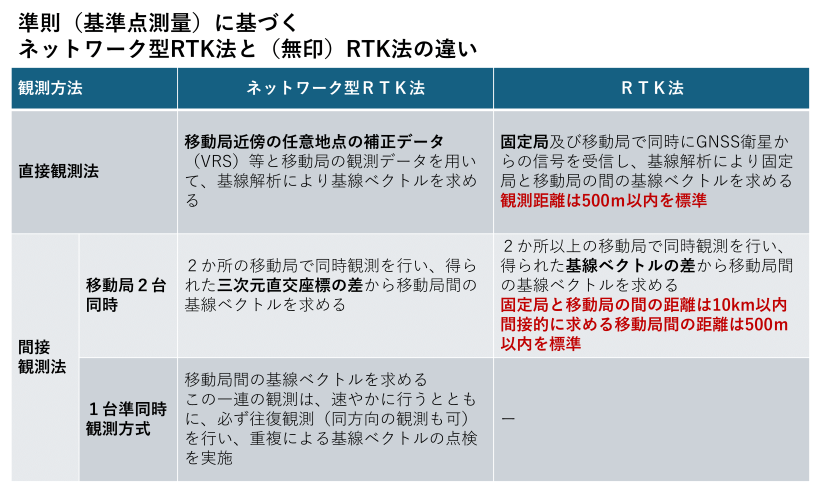
2024年4月号「ネットワーク型RTKとは」
GNSS測位で高い精度で位置情報を取得できるRTK方式ですが、ネットワーク型RTK方式と混同しがちです。
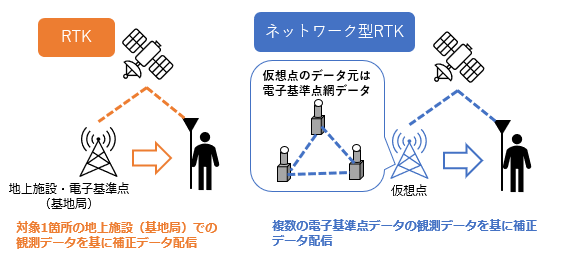
まずはRTK方式について、ご説明いたします。
■RTK方式とは
固定観測局から、その地点の位置座標と観測情報をインターネット回線や無線を利用して移動観測局に送信し、移動局では送られてくる固定局の情報と自局の観測情報を利用して即座に移動局に於ける位置情報を求める方式です。
■ネットワーク型RTKとは
上記RTK方式は単一固定局の位置座標と観測情報ですが、ネットワーク型RTKは複数の固定局情報で生成されたデータを、移動観測局に送信します。
方法もVRS方式とFKP方式があります。
ネットワーク型RTKについて、国土地理院より発行している測量業務の業務規程(作業規程の準則)にて、以下のように定められています。(抜粋)
“ネットワーク型RTK法は、位置情報サービス事業者(国土地理院の電子基準点網の観測データ配信を受けている者、又は3点以上の電子基準点を基に、測量に利用できる形式でデータを配信している者をいう。以下同じ。)で算出された補正データ等又は面補正パラメータを、携帯電話等の通信回線を介して移動局で受信すると同時に、移動局でGNSS衛星からの信号を受信し、移動局側において即時に解析処理を行って位置を求める。”
■ネットワーク型RTK方式のメリット
RTK方式に比べ安定して高い精度が確保できることから、作業面で様々なメリットを享受できます。
例えば測量業務の分野において、業務規程(作業規程の準則)では、以下のようなメリットを受けることで、業務効率化が期待できます。
ネットワーク型RTK方式で計画した作業に、RTK方式の観測方法を混在して観測した場合、再測量になる場合もありますのでご注意ください。
2024年5月号「高精度とは」
衛星測位などで「高精度」を謳う広告を、よくお見かけします。
高精度であれば「正しい位置を求められる」といったイメージが湧くと思いますが、少し曖昧です。
具体的に「高精度」とはどのようなことでしょう。
■正確度と精度
高精度測位が意味していることを構成するものは、「正確度」と「精度」になるのではないでしょうか。
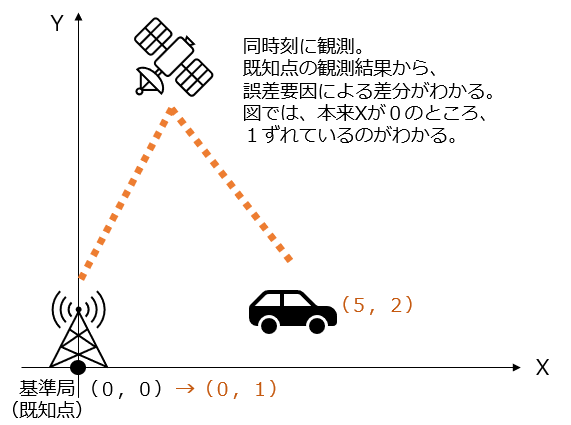
測位における「正確度」とは、”測定された座標値と、真又は真とみなす座標値との近さ”とISOで定義されています。
例えば座標値(0,0)の位置を観測した結果、座標値(0,10)より座標値(0,1)のほうが、「正確度が高い」と言えます。
測位における「精度」とは”測定された座標値の再現性の尺度”とISOで定義されています。つまり、何度観測しても同じ(あるいは近似した)観測値になることを「精度が高い」と言えます。
実際の衛星測位は、1回の測位で終わらせず10回程度観測しますが、10回ともまったく同じ値にはなりません。この10回の値それぞれが近ければ精度が高いということになります。
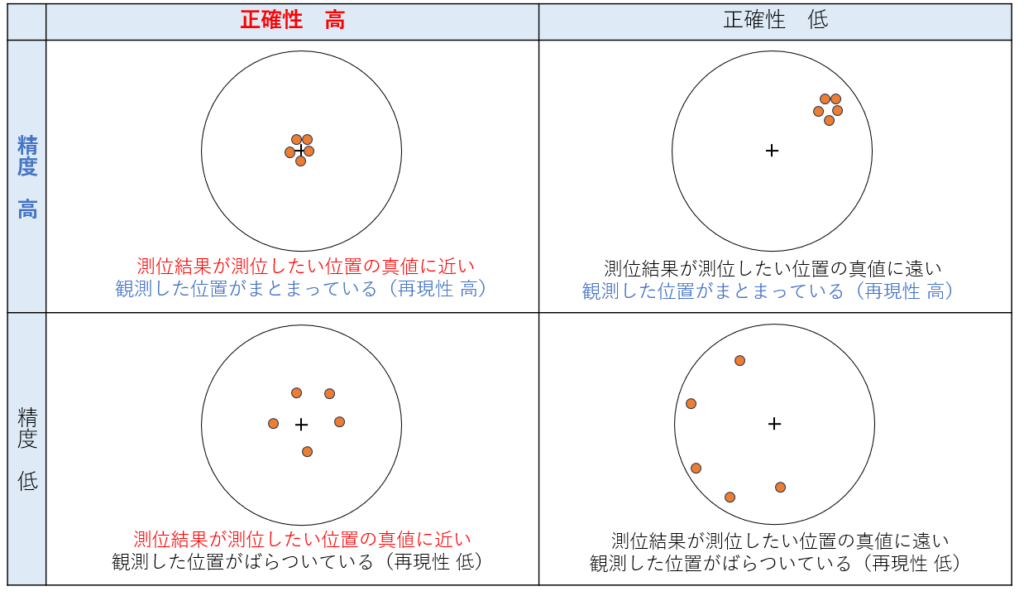
このことから、
「高精度測位」=「正確性が高い」+「精度が高い」
と言えます。
■正確度は決め事
前述の正確度ですが、どこを座標(0,0)にするかによって正確度がきまります。
用途によっては観測するかたがそれぞれ決めてもよいのですが、公共事業など多くの人が利用する場合は、共通の定義にしなければなりません。
この共通の定義が「測地基準系」であり、公共事業で使用する定義は「国家座標」と言います。
なおジェノバの補正情報を利用した測位は、国家座標に対して高精度な測位値を求められます。
2024年6月号「概説 位置が求まるまで」
今回はGPSをはじめとする衛星測位システム(GNSS)により、どのように位置が求められるのか、概説します。
概説のため端的なものになりますが、詳細は弊社公式サイトの技術情報や、メルマガバックナンバーにリンクを張りましたので、ご参照ください。
まず身近な衛星測位といえば、カーナビなどが挙げられると思います。
カーナビが位置を求めるにあたり、GPSなどの測位衛星からの信号をうけて、車にある受信機が解析して位置を求めます。
具体的には、信号の発信時間と着信時間、測位衛星の位置を使用して解析します。解析に必要な測位衛星は少なくとも4つ以上必要で、上空に測位衛星が多いほど解析しやすくなります。
参照:衛星測位の基本
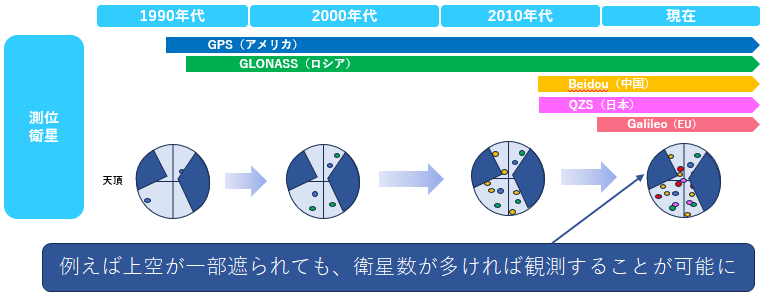
昨今は非常に多くの測位衛星が飛来するようになりました。測位衛星数も増え、うち日本の「みちびき」衛星も測位衛星になります。
もちろん上空が遮られると信号は受信できないのですが、多くの測位衛星が存在することで、利用できる測位衛星数が確保できるようになりました。
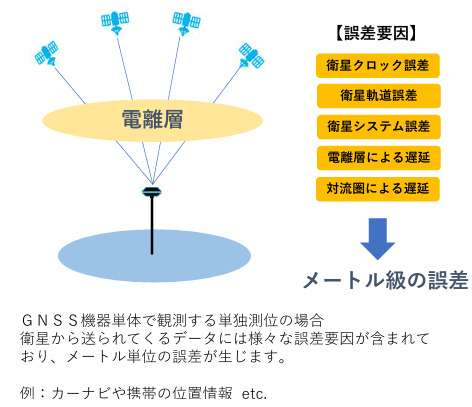
測位衛星を使用することで単独の位置が求まるのですが、実際の位置に対して最大10m近い誤差が
発生します。原因は衛星から受信する間に、様々な誤差要因があるためです。
参考:衛星から観測位置まで誤差要因がたくさんある
ここから精度を高めるには、「いかに誤差要因を取り除くか」という
ことになります。
まずは衛星が複数の周波数で信号を発信しており、周波数の違いにより誤差要因による遅延量(受信機への到達時間)が異なります。
このことから、GNSS測量機器などは複数の周波数で解析することで、信号の遅延量を算出し、誤差要因を打ち消します。
参考:1周波、2周波、3周波
上記に加え、既に位置が既知である基準局を利用することで、さらに誤差要因を打ち消すことができます。
基準局と観測点で同時に信号受信し、基準局の受信結果から既知点との差分がわかり、観測点側の受信結果と併せて解析することにより、精度の高い位置が求めることができます。
この方法のうち、即座に差分をとって測位解を求める手法を「RTK法」といい、複数の基準局を使用したネットワーク網として利用し、仮想的に近傍に基準局を生成するRTKを「ネットワーク型RTK」(VRS)といいます。
参考:
・RTK方式、RRSとVRS
なお当社は、ネットワークRTKに使用する補正情報の配信サービスを行っております。
2024年7月号「概説 高精度測位」
GPSをはじめとする衛星測位システム(GNSS)により位置は求められますが、測位衛星からの信号だけではメートル級の誤差が発生します。
この誤差を発生させているのは、以下のような誤差要因があるからです。
参考:衛星から観測位置まで誤差要因がたくさんある
この誤差要因をいかに取り除く点が、衛星測位の高精度化のポイントになります。
今回は代表的な高精度測位方式である「RTK方式」「ネットワーク型RTK方式」について概説でご説明いたします。
概説のため端的なものになりますが、詳細は弊社公式サイトの技術情報や、メルマガバックナンバーにリンクを張りましたので、ご参照ください。
■誤差要因除去方法について
「RTK方式」「ネットワーク型RTK方式」いずれの測位方式においても、大きく2つの誤差要因を取り除く方法を使用しています。
1つは周波数帯の違う信号の利用です。(搬送波位相測位)
測位衛星は複数の周波数で信号を発信しています。
周波数の違いにより誤差要因による遅延量(受信機への到達時間)が異なる特徴があり、GNSS測量機器などは複数の周波数で解析することで、信号の遅延量を算出し、誤差要因を打ち消します。
参考:1周波、2周波、3周波
もう1つは、既に位置がわかっている「既知点」を使用です。
既知点を衛星測位し、誤差要因を含んだ測位結果を求め、既知点との差分がわかることから、解析し位置を求める方法になります。
■「RTK法」「ネットワーク型RTK法」の違い
「RTK法」は既知点と観測したい点を同時に観測し、既知点の観測データを使用して観測したい点の位置を求めます。
「ネットワーク型RTK法」は観測したい点近辺の複数既知点を同時観測し、既知点の観測結果を使用して仮想的に観測点近傍に基準局を生成(仮想点)、仮想点での観測状況を使用して解析を実施します。
※VRS方式の説明になります
「RTK法」「ネットワーク型RTK法」いずれも高精度測位を実現しますが、それぞれの特長は違ってきます。
例えば「RTK法」は基準局の状態や、基準局までの距離(基線長)によって精度が出ないこともあります。(ネットワーク型RTKは左記要因による精度低下を担保しています)
参考:
・基線長が長いとどうなるか
・基線長と精度の関係について
また運用の観点でも基準局の設置・管理の工数を考えたり、観測現場へ
派遣する技術者や機材数の面でも違いがでます。
メリットデメリットをまとめましたのでこちらをご参照ください。
なお当社は、ネットワーク型RTKに使用する補正情報の配信サービスを行っております。
2024年8月号「地殻変動と測位について」
日本は4つのプレートの上に国土があり、プレートの下にプレートが入り込むことが起因で、地震が発生します。地震大国なので、皆様よくご存知だと思います。
お伝えしたいことは、「プレートは絶え間なく動いている」ことです。
つまり地面が動いているので、今観測した位置の緯度経度は、1年前の同じ位置の緯度経度と異なってきます。
■今期(こんき)と元期(げんき)
仮に地図を作成するため、北海道から沖縄まで順番に現地に赴き、観測したとしましょう。沖縄で観測が終わるころ、既に北海道や東北の観測結果がプレートの影響で変化してしまいます。
場所によりますが、1年に最大2cm程度動きます。
そこで観測結果を過去における特定の時期の位置に統一します。
(その特定の時期は1997年でしたが、東北地方太平洋沖地震のため関東から東北では2011年に変更されました)
具体的には、関東のある場所で2024年に観測した場合、2024年の位置が2011年から10cm動いているとすると、2024年の観測値から10cm引いてあげて2011年の位置にします。(とても単純に説明しています)
この過去における特定の時期の位置で求めた座標を、「元期座標」と言います。(測地成果2011に準拠した座標)
今観測(上記例では2024年に観測)した座標を「今期座標」と言います。
ちなみに2024年時点で、元期と今期の差で最も大きな場所では、2m近い変動量があります。(大規模な地震の影響などが目立ちます)
■地殻変動補正
地殻変動補正は、元期を求めるために行う補正となります。
今期座標に地面が動いた量(地殻変動量)を差し引いて、元期座標を求めています。
「セミ・ダイナミック補正」も今期座標から元期座標を求める補正となります。ちなみに、当社の地殻変動補正の計算方法とは異なります。
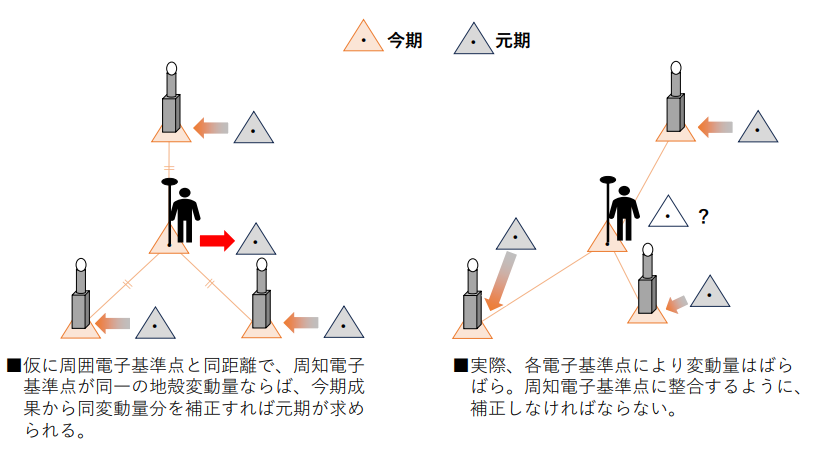
地殻変動補正を行うにあたり、変動量や方向を求めないといけません。
変動量・方向は周囲の既知点(元期座標が判明している点)を使用して、周囲既知点の元期座標に整合するように値を求めなければなりません。
単純な例ですと、下図左のように周囲既知点から等間隔の測点で、周囲既知点が同じ量で同じ方向に変位していれば、同量を同方向で補正すればよいです。
しかし、実態としては下図右のようになり、複雑な計算を行わなければなりません。
■ジェノバのネットワーク型RTKは地殻変動補正入り
ジェノバのネットワーク型RTK(リアルタイム観測・VRS)は、複雑な地殻変動補正の計算を自動で行ない、補正情報に反映しています。
ネットワーク型RTKの特徴として、観測位置周囲複数点の基準局を使用しているように、周囲の基準局(電子基準点)の変異ベクトルを基に補正ベクトルを算出し、周囲電子基準点に整合した観測ができるようになっております。
2024年9月号「座標系について(ITRFなど)」
ある場所を、昭和の時代に観測した座標結果と、令和の今に観測した座標では、おそらく400m以上も離れています。
大きく2つの理由があります。
理由の1つ目としては、今回のトピックスである「測地系」の変更です。
前者が「日本測地系」で観測しており、後者は「世界測地系」で観測しています。(日本は2002年以降、世界測地系に変更になりました)
測地系(測地基準系)は、地球上の位置を緯度・経度で表すための基準です。
地球は球体と認識されている方は多いと思いますが、実際は自転していることもあって、赤道付近が膨らんだ楕円体に近いものです。
緯度経度は、この楕円体上で定義されたものです。
理由の2つ目は観測に使用している楕円体のサイズが違うことです。
■日本測地系と世界測地系
日本測地系は、まず日本の基準点(日本経緯度原点)の緯度経度を求め、高さの基準点(日本水準原点)を定め、緯度経度・高さを楕円体にあてはめることで定義されました。
その際に技術的な限界もあり鉛直方向(重心の向き)がずれ、楕円体の重心と一致しないものになりました。
そして測量法により日本測地系の利用が明記され、改定されるまで使われていました。(国内の基準であれば、実用上問題なかった)
世界測地系は、宇宙測地技術の発展により正確な地球の楕円体のサイズ、重心位置、世界各地の位置関係がわかったため、、楕円体重心と自転軸を合わせ、世界各地の位置をあてはめることで定義しました。
この地球の重心の不一致により日本測地系と世界測地系では、大きな差が生まれてしまいました。
■世界測地系いろいろ(ITRF、JGD2011、WGS84)
ITRF、JGD2011、WGS84いずれも世界測地系になります。
ITRF(国際地球基準座標系)は、国際天文学連合と国際測地学地球物理連合によって設立されたIERS(国際地球回転観測事業)により、世界中にある観測局で各種観測・解析し、一連の観測所の位置から定義されたものです。
世界全体で共通に利用ができる測地系です。
数年おきに更新され(ITRF94、ITRF2000、ITRF2008、ITRF2014、ITRF2020)、更新ごとの差は僅かであり、測量成果に影響しない程度です。
余談ですが、ITRFは国際的な天体位置(星の位置)のフレームワークにも接続します。
JGD2011(測地成果2011)は日本で定義した世界測地系であり、ITRFに準拠(整合)しています。以前も世界測地系のJGD2000(測地成果2000)でしたが、東日本大震災をうけて改定されました。
この測地系は、現在の測量法にて使用することが定められ、観測した座標を「国家座標」といい、公共測量をはじめとした公の基準になっています。
WGS84はアメリカが定め、管理している世界測地系になります。
WGS84は当初ITRFとのずれがありましたが、双方の改良でお互いに近づき(WGSが近づき)、今ではほとんど差はありません。
■楕円体いろいろ(ベッセル楕円体、GRS80楕円体、WGS84楕円体)
地球を楕円体として緯度経度を定義していますが、楕円体のサイズにより位置が違うという点に少し触れさせていただきました。
楕円体が変化しても経度は変わりませんが、緯度が変わってきます。
日本測地系の時代に使用していた楕円体は「ベッセル楕円体」でした。
その後、世界測地系になり宇宙測位技術の発展により、正確な楕円体「GRS80楕円体」が定義されました。ITRFはGSR80楕円体を推奨しています。
またアメリカが独自に「WGS84楕円体」を定義しています。
GSR80楕円体とほとんど差がありません。
このように本来、位置(緯度経度・楕円高)を表示するにあたり、使用している「測地系」「楕円体」を一緒に記述するのですが、省略されていることが多いと思います。
2024年10月号「地震による地殻変動と成果改定」
日本列島は4つのプレートにはさまれており、そのプレートはお互いに絶え間なく動いています。
そのため、同じ場所の位置も少しずつ動いており、今現時点の座標位置を「今期座標」と言います。
地図を作成する際に、そのときどきの今期座標で地図作成した場合、時間の経過とともに少しずつずれていってしまい、別の時点の今期座標とは合わなくなるため、すべての地図を含む地理空間情報は統一した時点で表現します。
そのため、今測量を行ったら、「統一した時点」の座標に変換する必要があります。
この「統一した時点」の座標を「元期座標」と言い、測量の成果となります。
今期座標を元期座標にするためには、観測結果からプレートのゆっくりとした変動分を補正しなければなりません。
■地震による地殻変動
地殻変動には前述のようなプレートによるゆっくりとした変動と、地震のような急激な変動の2つに大別できます。
測量において、ゆっくりとした地殻変動を補正して元期座標をもとめるために「セミ・ダイナミック補正」を行います。
プレートによる地殻変動はゆっくりとしているだけではなく、場所ごとによる差は小さく、ある程度のせまい範囲内では平行移動となって、基準点などのお互いの相対位置関係はほとんど変化しません。
しかし大地震の場合は、せまい範囲でもお互いの位置関係が変わり、測量成果のままでは基準点間の整合性が取れなくなってしまうため、速やかに元期座標が改定されます(成果改定と呼びます)
この2つの地殻変動についての関係を、グラフにしました。
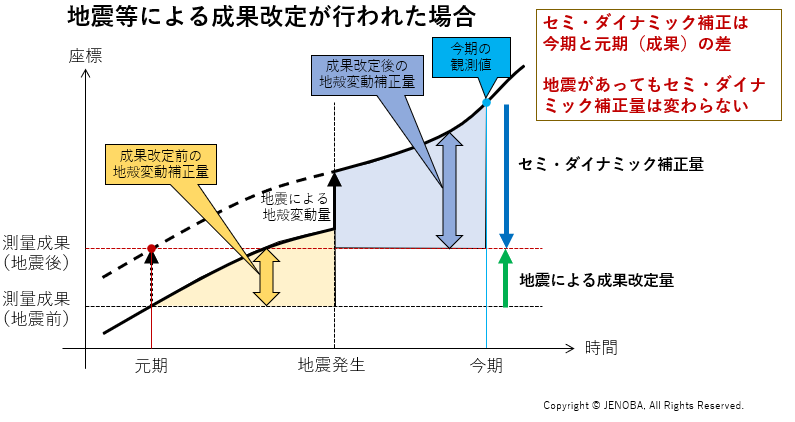
大規模な地震が発生し「地震による地殻変動量」が一定の基準を超えた場所では、元期の座標が改定されます。
セミ・ダイナミック補正については、地震前も後もプレートのゆっくりした変位することは変わりませんので、この補正量は変更せずに、引き続きゆっくり動いた量を補正します。
■ジェノバのネットワーク型RTKの場合
弊社のネットワーク型RTK(VRS)を使用した観測においては、セミ・ダイナミック補正に相当する「地殻変動補正」がより高精度に行われており、観測値はそのまま成果(元期座標)としてご利用いただけます。
この「地殻変動補正」はプレートがゆっくり動く量の補正となります。
そのため仮に大地震発生直後の成果改定前に観測した場合、観測値は「改定前の元期+地震による地殻変動量の値」になります。
つまり、「地震による地殻変動量を反映した成果」に相当する観測値といえます。
このため成果としてのご利用の際にはご注意ください。
2024年11月号「標高、海抜、ジオイド高、楕円体高」
令和7年度4月に全国の標高成果の改定が行われますので、事前に高さの考え方について整理します。
■標高とは、楕円体高とは、ジオイド高とは
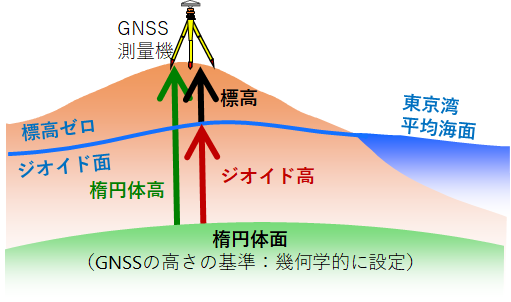
日本における標高は、東京湾平均海面をゼロメートルとして鉛直方向に測った高さになります。
GNSS観測でも標高を求めることができます。
標高は以下の図のとおり、”標高=楕円体高-ジオイド高”になります。
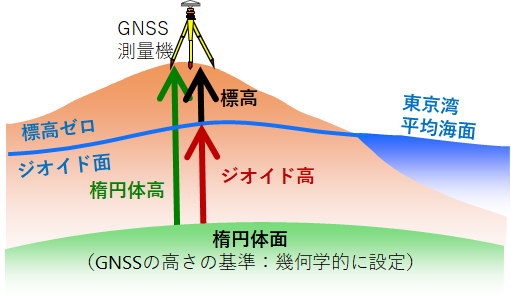
GNSS観測は地球を楕円体で近似した準拠楕円体を基準に見立てて観測しています。
その楕円体面から観測位置の鉛直方向の高さが「楕円体高」になります。
ジオイドは、「地球の重力による位置エネルギーが等しい面」になります。
この面が「地球全体の平均海面と整合する」と定義されています。
日本は前述のとおり、東京湾の平均海面を標高ゼロメートル=ジオイド面としています。
前述に重力の話がありましたが、重力は地球上で一様ではありません。
そのためジオイド高も一様でなく、場所によって違います。
地球は自転しているため、遠心力が発生します。
遠心力は回転の中心から外へ出そうとする力です。
地球上では赤道の上が一番強い遠心力のかかる場所となります。
また地球上では引力が発生します。
引力は地球の中心に向けて引き付けられる力です。
引力も場所により一様でなく、地中に重い物体があると引力が強くなります。
重力は、引力と遠心力の合力になります。
■全国の標高成果改定、高さ方向の「元期」※2025/2 文章を修正いたしました
来年、令和7年度4月1日に全国の標高成果の改定が行われます。(測地成果2024)
これによって、国土地理院が管理する電子基準点、三角点、水準点等、基準点の標高成果が改定されます。
標高成果の改定に伴い、2024年が高さ方向の新たな「元期」と設定されます。
日本列島は水平にも鉛直にも地殻変動しています。
地殻変動に対しては、弊社であれば「地殻変動補正」やセミ・ダイナミック補正により「元期」の位置に補正することができます。
(元期の時期が変わるため、令和7年4月1日から元期の楕円体高成果値が変わります)
また、令和元年より「航空重力測量」を実施されており、日本各地を高精度・高密度で重力値を観測し、精密重力ジオイド値が整備されました。その成果が「ジオイド2024 日本とその周辺」です。
2025年4月1日以降は「ジオイド2024日本とその周辺」ファイルを測量機器等に設定することで、高精度な重力ジオイドを使って、新たな測地成果2024での標高値を求めることができます。
(測量利用は令和7年(2025年)4月1日からになります)
■海抜とは
海抜は近くの港湾の平均海面をゼロメートルとした、鉛直方向の高さになります。
東京湾の周囲でしたら海抜と標高は一致しますが、海流や海水の温度・密度の違いによって、ジオイド面と海面の高さが異なり一致しません。
例えば、日本海側では東京湾に比べて20cmほど海面が高くなっています。
海抜はその土地の近くの海面からの高さになるため、その土地での津波などからの防災を考える上で、活用されているケースが多いようです。
■余談
来年度から実際どれぐらい標高が変更になるかが気になります。
本件について、国土地理院のほうで試算が公表されました。
東京近郊については、ほとんど変更なしです。
他の地域は現在の標高から、-5cmから-35cmの変更になりそうです。
国土地理院サイトに資料ありますので、ご興味のあるかたはこちらをご覧になってください。
2024年12月号「後処理データ(RINEX)について」
RTK観測を行うにあたり、観測位置の解析方法として大きく2つあります。
1つは、測位衛星からGNSS信号とリアルタイムに配信される補正データを使用して観測現場で即座に解析を行い、その場で位置を求める方法と、もう一つは、現場ではGNSS信号だけ受信して保存しておき、後ほど補正データを使用した解析を行い、最終的な位置を求める「後処理解析」があります。
(後処理解析は、Post ProcessingKinematic方式(PPK)といいます)
後処理解析は、以下のようなメリットがあります。
・現場で補正情報取得のためのネットワーク通信を行わなくてよい
・長時間取得された補正情報より、電離圏・対流圏の影響が平準化される
・解析時の設定変更が可能
後処理解析を行うためには、後処理解析に対応したソフトウェアが必要となり、観測データと補正データをソフトに取り込むことで、解析を行うことができます。
■後処理データの入手
後処理データは、弊社サービスでは会員用のWEBサイトから、以下項目を指定し、ダウンロード行うことで入手できます。
・基準局の指定(電子基準点の指定、または仮想点の位置)
・取得日時の指定
・データ間隔の指定
・使用する衛星システムの指定
国土地理院のWEBサイトでダウンロードできる後処理データは、基準局は電子基準点のみで、データ間隔も30秒のものだけです。
弊社のサービスではこのような制限はありません。
■後処理データの内容
後処理データの内容は大きく以下のとおりです。
1)観測データファイル(observation data file)
指定した条件の観測データで、具体的には以下のデータが格納されています。
・受信機機種名
・受信アンテナ名
・観測点の概略位置
・観測に使用した衛星リスト
・疑似距離
・搬送波位相
・ドップラー
・信号強度
2)航法メッセージファイル(navigation message file)
衛星の状態や、軌道情報、衛星クロック情報が記載されています。
衛星位置を正確に求めるために使用されます。
利用する衛星システム毎にファイルが存在します。
■RINEXファイル形式
後処理データはRINEX形式というファイル形式で記載されています。
RINEXはReceiver Independent Exchange Formatの略で、観測データをやり取りする際の標準フォーマットです。
GNSSの進化(Galileo衛星などの種類が増加、L6信号のような信号の追加)に合わせて、RINEXファイルの形式もバージョンアップしてきました。
簡単にバージョンアップの内容をご説明すると以下のようになります。
・RINEX2.x:GPSとGLAONASSのデータ
・RINEX3.x:マルチGNSSに対応
(主にQZSS、Galileo、Beidouの対応や、新しい信号に対応)
・RINEX4.x:上記に加えインドNavic衛星や新しい信号の対応
(QZSS L1C/Bなど)
■2025年夏からRINEX4.01の運用開始
現在、国土地理院にてRINEX ver.4.01形式データ提供の試験運用が行われており、2025年夏からRINEX ver.4.01形式データが正式公開されるとアナウンスがありました。
正式公開後の旧バージョンの扱いは、FTP提供については更新停止、HTTPではすぐには停止しないものの、将来的に更新停止の予定となっています。
RINEXの旧バージョンを使用したい場合は、国土地理院より提供されているツール「RINGO」で変換することで対応することができます。
2025年1月号「測量だけじゃないネットワーク型RTKの活用分野」
■重機の遠隔操作(事例:無人バックホウ遠隔操作への活用)
様々な展示会に訪問していますと、昨今における自然災害の激甚化と、ICT技術の普及を背景に、防災や復旧に対してICTで対応するといった展示が目立ってきました。
中でも重機の遠隔操作においては、以前に比べ製品が増えているように思えます。
災害復旧現場は、被災した現場に直接入るため安全対策が万全とは言えず、雨で緩んだ土砂が崩れるなど2次災害の危険があります。
そこで、復旧作業を行う重機を遠隔操作することで、安全に作業を進める試みが行われてきました。
さらに最近ではi-Construtionをはじめとした、建設業務の生産性向上についてのニーズの高まりの中、DXで課題解決する動向が強く、DXに対応した機器やソフトも増えてまいりました。
今回事例にご協力いただいた、国土交通省 中国地方整備局 中国技術事務所様では、このような背景に対し技術者育成にも注力されています。
中国インフラDXセンターを整備し、遠隔重機の操縦をはじめとしたDX施策の体験、技術習得を推進しています。
基本は重機に据え付けられたカメラの映像で操作を行うのですが、実際の施工においては、以下写真に写る右下のモニターのように、3次元の設計図と実際の地面の高さとの差分が表示され、ガイドを見ながら操作を行うことができます。
このガイド機能にネットワーク型RTKが利用されており、無人の重機に据え付けられているGNSSアンテナの情報と、アームに取り付けられたセンサー類の情報で正確な遠隔操作を実現することができます。
もちろん、ネットワーク型RTKのため現場に基準局の据え付けなどは不要で、ネットワーク接続できればすぐにご利用いただけます。

■3次元空間データの活用推進(事例:鉄道分野へのMMS適用)
以前に比べ3次元空間データの活用が身近になってきたように思われます。
観測機材やデータ生成サービスが多様になったことや、ユーザー側で3次元データの活用メリットを実感できるようになったからと推測しています。
例えば今回掲載にご協力いただいた事例の場合は、鉄道の軌道と周囲を観測して3次元空間データを作成、そのデータ内に建築限界※を表示させ、実際に建築限界の中に構造物が無いかを確認しています。鉄道路線のような長い距離を点検するには多くの労力や、軌道への立ち入り時間の規制もあるため、高いコストが必要になりますが、3次元空間データを生成することで大幅な効率アップとなります。
※【建築限界】交通の安全を確保するため、道路、軌道、鉄道上において障害となる工作物や構築物の設置が許されない空間範囲
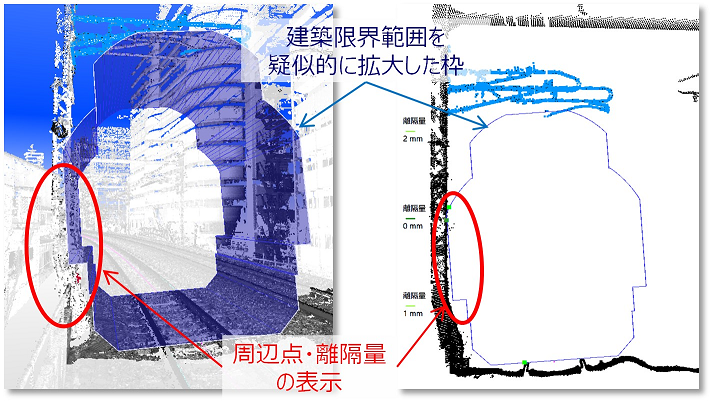
他の3次元空間データ活用方法としては、現場に行かなくてもデータから長さや容量を計測したり、過去のデータとの差分を比較して変位確認や施工進捗を管理したり、これから建設・設置する構造物のモデルをいれて施工後の状況を確認などが挙げられ、今後も利活用が進むと思われます。
なおジェノバの補正情報を使うことで観測時リアルタイムに、あるいは観測後に後処理データを使用して、観測位置を補正します。
特に国家座標と整合が必要な3次元空間データを生成においては、非常に有効です。
2025年2月号「みちびき7機体制」
■「みちびき」とは
この度打ち上げられた「みちびき」ですが、「みちびき」は愛称で正しくは準天頂衛星システム(QZSS)と言います。
(Quasi(殆ど)Zenith(天頂)Satellite(衛星)System)
QZSSの大きな特徴は衛星軌道で、GPSなどは地球を中心に周回し世界各国の上空を通過しますが、QZSSは日本~オーストラリア上空で南北に8の字を描くような軌道になります。
(経度の移動が少なく、緯度の移動が大きい)
この軌道により、日本上空の天頂付近に長く衛星が留まるような動きになります。
天頂に測位衛星があれば、ビルの狭間でも上空さえ見えていれば、衛星測位に使用することができるという点が特長です。
他の特徴にGPS互換やCLASなどもありますが、今回は割愛いたします。
よろしければ、以前のメルマガ記事を参照ください。
【参照】
・2022年2月号 QZSS「みちびき」とは
・2022年8月号 QZSSのCLASの特徴
■7機体制の意味
2025年度内にQZSSは7機体制になる見通しです。
QZSSは前述した8の字の軌道を描く衛星(準天頂軌道衛星)と、赤道上空の定位置にいる静止衛星の2種類に大別でき、以下のようになっています。
準天頂軌道衛星:初号機後継機、2号機、4号機、5号機※
静止衛星:3号機、6号機※、7号機※
※2025年度運用開始見込
7機体制になることは、衛星測位に利用できる衛星数が増加するので、測位環境が良くなるだけでなく、重要な意味合いがあります。
GNSS測位は、最低でも4機の測位衛星から信号を受信しなればいけません。
どうして4機必要なのかは、以下弊社ページをご参照ください。
【参照】・衛星測位の基本
現在は4機体制で運用していますが、準天頂軌道衛星は軌道上ある程度間隔をあけているため、3機同時に利用することが難しく(南半球上空にいる場合は、地平線に近い位置にあり、信号がほとんど届かない)、QZSSだけで測位することは実質できません。
そのため衛星測位するためには、GPSをはじめとした他国の運用している測位衛星からの信号受信が必要になります。
もし仮に他国が運用している測位衛星が利用できなくなった場合、GPSを使用する機器が使用できなくなるため、衛星測位することができません。
しかしQZSSを7機体制にすることで、常時衛星測位が可能となります。
■5号機、6号機、7号機からの新機能紹介
2025年度運用開始する、5号機、6号機、7号機には新機能があります。
(3機打ち上げられてから検証される見込みです)
・衛星間測距システム
これまでは衛星位置は地上にある複数の監視点から衛星との距離を測ることで、求めてきました。
しかし地上の施設からだけでは偏りがあり、精度に限界がありました。
そこで、衛星間で測距することで衛星位置の誤差を小さくすることができます。
・衛星/地上間測距システム
衛星と地上間の距離を求めるにあたり、地上で衛星信号から距離を測るだけでなく、衛星側でも地上からの距離を測り、双方向で計測することで誤差を打ち消します。
さらに上記2つの機能を運用する地上検証システムも導入され、実証運用が始まります。
GNSS測位において、測位衛星からGNSS受信機まで信号が到達する誤差要因として、以下のような要因がありますが、上記機能が本格運用されれば、単独測位からネットワークRTKまで方式を問わず、精度向上が期待できます。
2025年3月号「元期設定が2024年になる」
■元期(げんき)とは
日本列島は4つの大陸プレートの上にあり、大陸のプレートがお互い動いていることから、場所により水平で年間最大2cm程度動きます(地殻変動している)。
刻々と位置が変化しているため、地図等に記載にする場合は「ある時」の位置で統一して地図を整備します。
この「ある時」が「元期」になります。
■高さ方向も地殻変動で動いている
こうした地殻変動では、水平方向だけでなく高さ方向も動いています。
改定前(2025/3/31迄)の元期は、およそ東北地方から関東地方で2011年、その他の地域では1997年であり、現行の元期からは今回の4/1改定まで10年間以上経過していることから、場所により高さも大きく変化しています。
今回高さ方向の元期を2024年に設定したことで、改定前の高さから長期間の変化を反映した高さになり、4/1から基準が変わります。
■楕円体高、標高
楕円体高も標高も「高さ」です。
その関係は、「標高=楕円体高-ジオイド高」になります。
ジオイド高は「地球の重力による位置エネルギーが等しい面」までの高さですが、日本においては「東京湾平均海面までの高さ」としても問題ありません。
詳しくは過去のメールマガジンを参照ください。
※参考:メルマガ2024年11月号「標高、海抜、ジオイド高、楕円体高」
この元期の基準が変わることによって、「楕円体高」が変更になります。
楕円体高が変更になれば、「標高=楕円体高-ジオイド高」のため、標高も変更になります。
2025年4月号「標高成果改定の主な変更点」
2025年4月1日に標高成果改定により変わるもの、変わらないものは以下のとおりです。
○変わるもの
・標高(ジオイドモデル、楕円体高、アンテナ位相特性モデル)
○変わらないもの
・楕円体
・日本水準原点の値
・水平座標の測量成果
・比高(標高差、楕円体高差)
■標高が変わる
標高と楕円体高、ジオイド高の関係は下図の通りです。
(標高=楕円体高-ジオイド高)
電子基準点のアンテナ位相特性モデルの変更は、楕円体高、ジオイド高に比べ微小な影響のため、今回は割愛いたします。
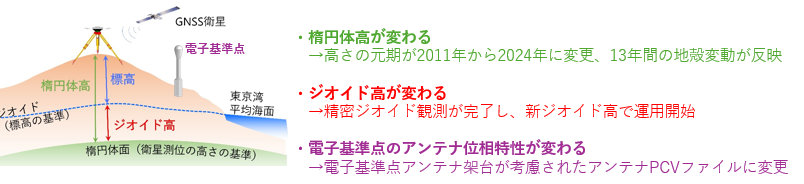
それぞれの要素が変更となっています。
・楕円体高
→高さの元期(げんき)が2011年から2024年に変更、13年間の地殻変動が反映
※楕円体高の元期変更について詳しくは前号を参照ください
・ジオイド高
→「ジオイド2024日本とその周辺」が完成し、新ジオイド高で運用開始
・電子基準点のアンテナ位相特性モデル
→電子基準点アンテナ架台が考慮されたアンテナPCVファイルに変更
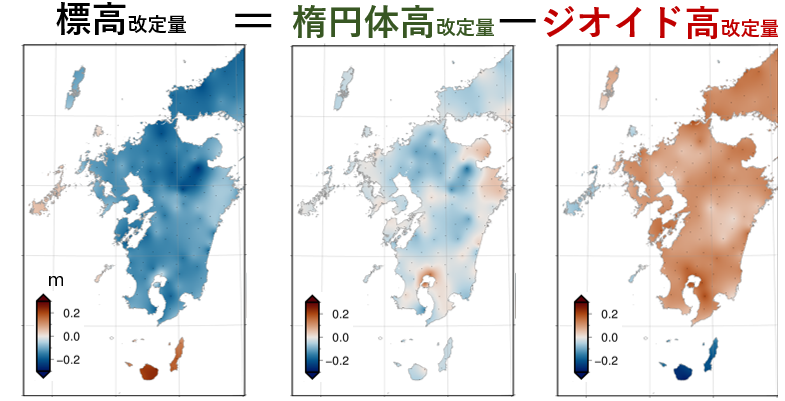
このため、全国一様に標高が上がったり下がったりせず、その場所における楕円体高とジオイド高の関係で標高が変化します。
参考ですが、九州における違いを図にしました。
楕円体高が低くなり、ジオイド高も高くなっているので、標高が下がっている場所(青色)が目立ちます。
※標高(減)=楕円体高(減)-ジオイド高(増)
もちろん変わらないケースも存在します。
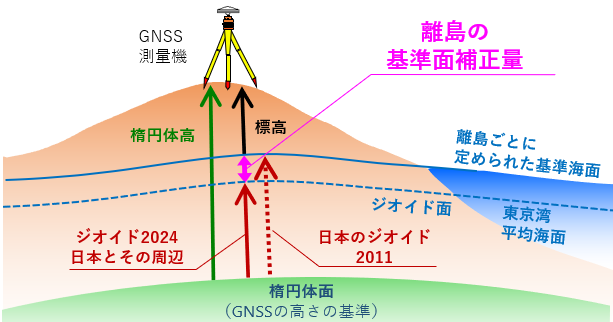
■離島の観測はご注意(離島における基準面補正)
日本においてジオイド面(標高0の位置)は、基本的に東京湾平均海面になります。
これまで、水準測量が直接取り付けられていない離島においては、ジオイド面が東京湾平均海面でなく、各島の平均海面に
なっており、旧ジオイドファイルには離島ごとの基準面補正値が含まれていました。
今回の標高改定では、以下の2点の変更がありました
・一部離島(トカラ列島以南、八丈島以南)を除いて、多くの離島で標高0の位置が
東京湾平均海面に変更
・ジオイドは、日本とその周辺でシームレスになり、各島の基準面補正が含まれない
このため、離島によって標高の変化量が異なっています。この変更に対応するため、国土地理院よりジオイドファイルと離島の基準面補正を合わせた、「統合ファイル」が用意されておりますので、当該ファイルをご利用ください。
(離島でなくてもそのまま利用できます)
- GNSS測位について
- 衛星測位の基本
- GNSSとGEONETについて
- 位置の考え方(座標の考え方、高さの考え方)
- 精度を高める測位方式について
- 地殻変動補正について
- メールマガジンバックナンバー(特集記事)
- サービス利活用について、サービスマニュアル
- 高精度位置情報の産業利用
Contact
お問い合わせ-
まずはお気軽にご相談ください
-
お申込みはこちら